
www.searchmesh.net
Title: Recommended operating guidelines (ROG) for
underwater video and photographic imaging
techniques
Author(s):
Roger Coggan (Cefas), Annika Mitchell (QUB), Jonathan
White (MI), Neil Golding (JNCC)
Document owner:
Roger Coggan ([email protected])
Reviewed by:
Annika Mitchell (QUB), Jonathan White (MI), Neil
Golding (JNCC)
Workgroup:
Video Working Group
MESH action:
Action 2
Version:
11.2
Date published:
Not published
File name:
Video ROG v11
Language:
English
Number of pages:
32
Summary:
Recommended operating guidelines for underwater
video and photographic imaging techniques.
Reference/citation:
N/A
Keywords:
Video, recommended operating guidelines (ROG),
guidance, standards, protocols
Bookmarks:
Related
information:
Includes links to associated Excel spreadsheet ‘Video
metadata v4.xls’

Change history
Version: Date: Change:
11.2 07/09/07 Final review for MESH Guidance publication
11.1 25/6/2007 Final editing and trimming to form ROG J. White
10.1 15/11/2006 Updated content and hyperlinks, prior to submission
to Marine Institute
All others Previous developmental versions held by Roger
Coggan

www.searchmesh.net
Recommended operating guidelines for underwater
video and photographic imaging techniques
1. Introduction
In habitat mapping, the principal objective of sampling with underwater
cameras (video and/or stills cameras) is to obtain images of the seabed that
will help to ground-truth base maps derived from remotely sensed data.
Imaging the surface of the seabed can provide information on:
• The physical nature of the seabed (e.g. sediment type);
• The type of epifaunal communities associated with particular substrates
(i.e. the variety of biotopes);
• The distinctness of boundaries between different habitats/biotopes (e.g.
discrete boundaries between rock and sand, or a gradual transition from
sandy gravel to gravely sand);
• The heterogeneity of habitats/biotopes within an area that appeared to be
homogeneous to remote sensing techniques (e.g. on the acoustic base
map);
• The nature of the apparent boundaries observed by remote sensing
techniques.
Observations using video techniques usually provide qualitative or semi-
quantitative data; those using still-photography (‘stills’ images) can also
provide fully quantitative data (counts of individual per unit area of seabed).
Video and stills images can be rendered entirely useless for mapping
purposes if they cannot be adequately georeferenced. It is therefore critical
that suitable measures are taken to record positional data and to provide an
estimate of its accuracy (quality assurance).
The MESH Video Working Group report “Seafloor Video Mapping: Collection,
analysis and interpretation of seafloor video footage for the purpose of habitat
classification and mapping” (White et al. 2007) at
http://www.searchmesh.net/PDF/Video%20Working%20Group%20Report.pdf
gives information on:
• The utility of video techniques
• The general principles of operation and data processing
• The variety of systems available.
This document provides guidance on the standards and protocols that should
be used to acquire video/stills material for seabed habitat mapping. The
principle aims are to ensure that:

www.searchmesh.net
• a consistent procedure is followed when collecting the images;
• the images are accompanied by relevant metadata;
• the images can be adequately georeferenced.
Consideration is also given to matters relating to mobilisation/demobilisation
of equipment, the storage and backup of images, and training and skills
requirements.
The guidance is not intended to be prescriptive or to cover every set of
circumstances that the user may encounter. Rather, it highlights matters that
the user should consider and address. A single generalised guidance is given
which covers the use of drop-cameras, towed video sledges, ROVs and diver-
held video. This is written for a towed video sledge, with subsequent notes on
modifications or additional considerations relevant for using the three other
platforms. A separate guidance note is provided covering the special case of
sediment profile imagery.
2. Pre-installation and mobilisation
When planning a video survey, it is important to ensure that the vessel to be
used is suitably matched to the gear and to the purpose of the survey. Video
platforms range from light, compact drop-frames weighing a few kilograms, to
sledges that need to be towed at slow, constant speeds and large ROV
systems that require dedicated winches, cranes and power supplies. A
mismatch between the equipment and the vessel will compromise the safety
of the operation. Points to consider include:
• Is the vessel suitably designed and equipped to deploy and recover the
equipment?
• Are there adequate power supplies for lighting, recording equipment,
etc?
• Is there sufficient, suitably located dry space to house the deck control
units and recording equipment?
• Can cables be passed through a window or bulkhead to link all the
equipment together?
• Can the vessel tow a sledge at slow speeds (0.5 knots)?
• Can the vessel hold position for drop-camera or ROV work (anchoring,
dynamic positioning)?
• What hazards may cause the umbilical to become entangled under the
vessel?
• Are there sufficient crew members to handle the equipment?
• What sea conditions are required for the safe deployment and recovery
of the equipment?
You should also consider any operational limitations of the equipment:

www.searchmesh.net
• The length and load bearing capacity of the umbilical cable (a separate
warp/wire may be required to tow or lift the equipment);
• The pressure rating of the camera housing and lighting units;
plus what will be needed to provide adequate positional data:
• Is there a reliable dGPS system available that can feed positional data
to a logging and/or video-overlay device?
• What position on the vessel does the navigation feed give? Is it the
position of the GPS aerial or an offset position, such as the stern gantry
or a ‘common reference point’ at the centre of the vessel?
• Can USBL (Ultra Short Base Line) devices be used to derive the
positions of the deployed gear?
• If not, is there a method for measuring the amount of cable deployed
on towed systems, so their position can be estimated using a ‘lay-back’
calculation?
An equipment checklist should be drawn up to ensure all the relevant bits of
equipment, spares and maintenance equipment are taken, including sufficient
media for recording and backup (video tapes, DVDs, hard-drives, etc). It is
recommended that pro-forma sheets are taken to record metadata for each
dive or deployment. These provide a valuable prompt to ensure that all the
necessary metadata are recorded on each deployment (see later section
giving an example of a field recording sheet for video surveys).
Once on board the vessel, the relevant personnel should be briefed on
matters relating to:
• Safety and operational hazards
• Standard operating procedure
• Data and metadata recording requirements.
Adequate time should be allowed for setting up and testing the equipment,
including a test deployment and a deployment for calibrating instruments (see
next section).

www.searchmesh.net
3. Test and verification protocols
Video and camera systems require little calibration per se. However, there are
several aspects that should be carefully attended to during the set-up and
testing of equipment. These are:
• Correct linear sequence of set-up for video recording
• Synchronisation of clocks with GPS time
• Set-up of video overlay system
• Measures to ensure the field of view of the camera can be determined
• Optimal lighting verification.
3.1 Linear sequence of video recording
If two or more video-recording methods are to be used (e.g. digital video tape,
DVD, VHS tape), it is important to ensure that they are connected in an
optimal sequence. The video-camera may produce data at a faster rate than
can be recorded by some platforms, especially DVD recorders that write data
directly to disc. Such ’slow’ devices record only part of the full signal, leading
to significant reduction in the quality of the recorded image, and the quality of
the signal that is output to further recording devices further down the line. If
such a ‘slow’ DVD recorder is placed first in the sequence of equipment (e.g.
DVD >> DV tape >> VHS tape), then the quality of all recordings will be
reduced to the quality recorded by the DVD. Consequently, the first recording
method in the sequence should be that which writes data the fastest, this
ensures that the signal is not degraded before it is fed into the subsequent
recording systems. An optimal set up for multiple recoding devices may be DV
tape >> VHS tape >>DVD.
3.2 Synchronisation of clocks with GPS time
Several of the devices used in capturing and recording video images contain
clocks of one type or another. These should all be synchronised with the GPS
clock so that any time stamp associated with an image or recording can be
cross-referenced to the positional data in order to georeference the image.
This includes any internal clocks of digital stills cameras, which add a time
stamp to the metadata tags embedded in each digital image (e.g. the ‘EXIF’ or
IPTC files’ What are EXIF and IPTC?). A method for checking the clock in a
digital stills camera is illustrated in Figure 1. All other clocks that may be used
to derive time records relating to the sampling event should also be
synchronised with GPS time (e.g. wall clocks, wrist watches, PC clocks, etc).
The synchronisation of the clocks should be checked periodically (every few
days).

www.searchmesh.net
Figure 1. Checking the synchronisation of the internal clock of a digital stills camera.
A picture has been taken of a clock synchronised to GPS time. The inset shows the
date/time stamp tagged to the image file by the camera (21/07/2006 16:46:10). The
clock in the camera is 2 seconds behind the GPS clock (an acceptable error, as it
was less than the update rate of the GPS fix).
3.3 Set-up of video overlay system
A video overlay system can be used to superimpose useful information on the
video image before it is recorded. This information can include metadata
relevant to each sampling station (e.g. station code, station number) and real-
time data such as date, time and position. If positional data is to be displayed
on the overlay, it is important to include a label to show precisely what the
positional information represents: does it show the position of the towed
equipment as determined from a USBL system, the position of the GPS
antenna on the ship, or a calculated position offset from the GPS antenna
(e.g. common reference point or ‘CRP’ on larger survey vessels)?
3.4 ‘Calibrating’ the field of view of the camera
To assist with interpretation and analysis, it is important that the scale of the
image can be determined. For habitat mapping, this does not have to be
precise, as there is rarely a need to take measurements of objects, but the
calibration should allow the observer to appreciate the true scale of the
objects viewed in the image. ‘Calibration’ can be achieved in several ways.

www.searchmesh.net
Laser-scaling devices project multiple ‘pinpoint’ spots of known, fixed distance
apart onto the seabed, providing a reference scale within the image against
which measurements can be made. While they draw little power, there must
be a sufficient number of wires within the umbilical cable to run power to the
camera, the lighting system and the lasers. Tests should be made to ensure
the lasers are properly aligned with the central axis of the camera lens and so
fall in the centre of the field of view. Lasers are a particularly effective means
of providing a reference scale on drop-frames or ROVs where the field of view
varies with the altitude of the camera above the seabed (Figure 2), but they
can equally be used on camera sledges, where the camera usually has a
fixed field of view (mounted either vertically or obliquely).
Figure 2. Spots from the same laser-scaling device used on a drop-camera frame.
The camera is at a higher altitude above the seabed in the left image than in the right
(photos by Cefas).
If laser-scaling devices are not available, the field of view for sledge-mounted
cameras can be measured on a test deployment to record the image of a
sturdy metal grid tied flat underneath or between the sledge runners. The grid
should be wider than the field of view so that aberrations towards the edge of
the view can be noted. The ‘calibration’ recording must be made with the
camera underwater, as the field of view in air (i.e. on deck) is greater than that
in water. A new calibration will be required whenever the camera position is
adjusted on the sledge. The recorded grid can later be traced onto a monitor
screen to provide a reference scale during playback of the sample video.

www.searchmesh.net
An inexpensive alternative for sledge systems is to fix a scale bar as close as
possible to the base of the sledge runners so that it appears at the periphery
of the field of view (Figure 3).
Sufficient time should be allowed to set up, test and calibrate the system; this
will vary with the type and complexity of the system. A typical camera sledge
system with a video and a stills camera will require about four hours to set up
and a further four hours to test and calibrate. A minimum of two people are
required, one on deck dealing with the camera frame, the other in the
operations room dealing with the power and recording systems. On larger
vessels it is useful if these two people can communicate, via a VHF radio or
tannoy.
It is recommended that cameras should not be used in auto-focus mode, as
suspended material in the water column (especially disturbed sediment) will
cause focusing errors. Cameras should be set to an appropriate fixed focal
length if they do not have a real-time manual focus capability.
Figure 3. A simple scale bar showing 2 cm divisions, attached to the camera sledge
(photos by Cefas).
When ground-truthing acoustic base maps, it is extremely advantageous to be
able to see the real-time position of the camera as it moves over features on
the acoustic base map. This can be achieved by feeding live
navigation/positional data into a GIS application (e.g. ArcView or MapInfo) or
visualisation software (e.g. Fledermaus) displaying a georeferenced image of
the acoustic data (e.g. a geotiff of the sidescan or multibeam mosaic). This
allows the observer to immediately relate what is seen on the video with what

www.searchmesh.net
has been sensed by the remote acoustic techniques and can be a valuable
aid to the safe conduct of the video survey. For example, when using a drop
camera frame in high relief areas (e.g. rock outcrops), the camera can be
raised on the approach to oncoming obstructions.
3.4 Optimal lighting verification
Lighting is crucial to the quality of video imagery and attention should be paid
to setting up the lamps to provide an even spread of light over the field of view
(i.e. minimising bright or dark spots). The correct position for placing lamps on
the tow-sled can be estimated during the set-up procedure. However, such
lamps tend to be high-output filament bulbs, which generate a lot of heat and
are designed only for in-water use. If left on for longer than only fractions of a
minute in air, they can overheat and become damaged. Therefore, it is
important to test and note lighting during test deployments, and subsequently
to adjust the position and angle of lamps as necessary.
Lamps should be positioned to minimise the amount of light that is scattered
back into the camera lens from particulate matter in the water column, as this
can dominate the image and mask the view of the seabed. Backscatter is
most intense along the central axis of the lamp, so will be greatest if the lamp
is placed close to the axis of the camera. Consequently, the lamps should be
set on a different plain to the camera (Figure 4). Angling lights inward will
increase the illumination of the water column that can be seen by the camera,
and so promote backscatter. Therefore, lamps should be aligned parallel to
the axis to the camera, as far as is possible (Figure 5).
Figure 4. Cross-section of video-sled showing lights mounted below the camera (left)
and on the same plane as the camera (right). The latter position increases the
amount of light entering the lens that is backscattered from particulate material
suspended in the water column, which is undesirable (camera sled in partial outline).
Camera
Light
Camera & Li
g
ht

www.searchmesh.net
Figure 5. Plan view showing the field of view of the camera relative to the beams
produced by the lamps. The red sector outlines the part of the water column that the
camera can see. If lamps are aligned with the camera (left) only a small proportion of
the visible water column is illuminated, minimising the amount of backscatter. If
lamps are angled inwards (right), more light passes through the visible water column,
increasing the backscatter.
Camera
Li
g
ht
Li
g
ht
4. Recommended operating guidelines
This section sets out a standard procedure for the conduct of a video dive.
The example given relates to the use of a towed video-sedge equipped with
an oblique, forward-looking video-camera with a laser-scaling device and
floodlamps, and a vertical, downward-looking digital stills camera (with flash)
which can be triggered from the deck control unit. Most of the procedure will
also be applicable to the use of drop-camera frames and ROVs, but where
specific alterations are required, these will be covered later. The main phases
of the dive are illustrated in Figure 6.
1
Stills at 1 minute intervals
Dive
Start of line
End of line
300m
Figure 6. Schematic illustrating the protocol for a 300 m video-sledge transect,
including stabilisation time of 2-5 minutes at ’1’.

www.searchmesh.net
4.1 Pre-deployment routine
4.1.1 Prepare pro-forma field recording sheet.
Complete all sections of the pro-forma record sheet for which information is
known before the gear is deployed: e.g.
cruise code, survey name, station
code, station number, date, weather conditions, and details of any labels that
will be given to video media (see example in section Recommended logging
information, below).
4.1.2 Prepare the video overlay
Enter the relevant data onto the video overlay system.
4.1.3 Record ‘header’ shots on the video and stills cameras
Copy the relevant station data onto a whiteboard, chalkboard or similar and
record video and stills shots of this to mark the beginning of the record for that
tow/dive (Figure 7). If a DVD recorder is being used, use the ‘pause’ function
to temporarily halt recording. Using the ‘stop’ function would cause the header
data and video record to be written to different ‘chapters’ on the DVD.

www.searchmesh.net
Figure 7. Header shots taken on video and stills cameras to record relevant station
data at the beginning of the dive. The header shot for the video-camera (left) also
shows the video overlay information (top) and an overlay showing the camera
settings (bottom and right).
4.1.4 Test systems
Before deployment, test that all lighting systems, lasers, etc are working.
Check the camera is set to manual focus (not auto-focus). Turn all lighting and
laser systems off before deployment.
4.2 Deployment
The vessel should come to a near standstill before deployment and maintain a
speed of approximately ~0.3 knots (speed over ground), heading into the tide.
The sledge will be deployed over the stern of the vessel and this slow speed
will allow a controlled operation and prevent the vessel drifting back over the
gear once it is in the water.
4.2.1 Deploy the ‘buff’
The ‘buff’ is a small buoy attached to the back of the sledge by a rope of
length ~2 x water depth (Figure 8). It helps to stabilise the sledge during
towing and can be used to recover the sledge if the towing cable/umbilical
breaks. The buoy should be streamed out behind the vessel before the sledge
is deployed.

www.searchmesh.net
Figure 8. A ‘buff’ buoy attached to the rear of the sledge by rope.
4.2.2 Deploy the sledge
The sledge is lifted (by winch/crane/gantry) over the stern of the vessel and
into the water. If the gantry (or ‘A-frame’) is articulated, it should be angled
astern to ensure the sledge and cable are clear of the propeller and rudder.
The winch-man should set the ‘cable out’ reading to zero when the sledge is
on the surface. As soon as the sledge is submerged by 1-2 m, the lights can
be activated. If the umbilical is separate to the towing cable, they should be
tied together as the cable is paid out, using ties (e.g.
quick-release cable ties)
at ~20 m intervals. This prevents strain on the umbilical. The procedure will
require three personnel: one to operate the winch, one to tie the umbilical to
the tow cable, and one to flake out the umbilical from the spool on deck. A
fourth person should be observing the video monitor as the sledge descends,
and should alert the helmsman and deck crew when the sledge reaches the
seabed.
4.2.3 Stabilisation phase
Once the sledge is on the seabed, a period of up to 5 minutes should be
allowed to adjust the length of the towing cable and the speed of the vessel so
that the sledge is being towed smoothly across the seabed at ~0.5 knots
(speed over ground). During this time, the power to the video lighting system
can be adjusted to provide optimal illumination for the prevailing conditions.
Once the system is fully stabilised, the amount of cable deployed should be
recorded, and the scientist-in-charge should declare the ‘official start’ of the
transect line (SOL).

www.searchmesh.net
4.2.4 Starting the transect
At the official start of the transect line, the following should occur
simultaneously or in rapid succession (<5 seconds):
1. A position fix is taken and the GPS logging device is started;
2. The video-recording is started (DVD recorder taken off ‘pause’ mode);
3. A still image is taken;
4. A clock is started that will provide an alarm at one-minute intervals to
indicate when the next routine still image should be taken;
5. The time, position, water depth and vessel speed are noted on the field
log-sheet.
4.2.5 Observation phase
During the observation phase, notes should be made on the field record sheet
on the nature of the seabed, changes in sediment type and the fauna
observed. Still images should be taken at regular intervals (e.g.
every 60
seconds) to provide a series of ‘quadrats’ along the transect. If required,
additional stills can be taken on an ad-hoc basis to capture features of special
interest. If position is not being logged continuously, a position fix should be
taken for each of the stills taken at 1-minute intervals. Note should be kept of
any changes to the length of cable deployed during the tow.
4.2.6 Finishing the transect
At the end of the transect, the scientist-in-charge should declare the ‘official
end’ of the transect line (EOL) and the following should occur simultaneously
or in rapid succession (<5 seconds):
1. A still image is taken;
2. A position fix is taken and the GPS logging device is stopped;
3. The video-recording is stopped;
4. The time, position and water depth are noted on the field record sheet.
The gear can then be recovered from the seabed. During the recovery phase,
it is useful for the observer to make a sketch on the field notes, which outlines
the main features observed as the tow progressed. This is a valuable
aide-
memoir and captures the observer’s immediate assessment of the site, which
will be informative during any later review or analysis of the video and
photographic record.

www.searchmesh.net
4.3 Recovering the sledge
The recovery process is a simple reversal of the deployment.
4.3.1 Safety considerations
Particular attention should be made to the following points on safety:
• Before the sledge reaches the surface, all lights and lasers should be
turned off;
• The vessel should come to a complete halt during recovery, with no
backwash being made by the propulsion unit, so that the equipment can be
lifted vertically up the stern of the vessel. If the vessel is making way, the
sledge will crash into the stern as it is lifted, causing damage to cameras,
lighting systems and cable connections. For vessels with dynamic
positioning (DP), this should be disabled while the sledge is being lifted
from the water, as it can cause unexpected motion of the main propeller.
4.3.2 Final deck operations
Once on deck, the gear should be inspected for damage and loose
connections. The digital stills camera should be downloaded, the images
checked and saved to an appropriately labelled folder. The folder name
should be entered on the field record sheet. All equipment should then be fully
prepared for the next dive.
5. Quality control procedures
A formal quality control procedure should be followed to check the field record
sheet has been fully and properly completed. The observer should initial the
sheet and pass it to a third party (e.g. scientist-in-charge) for checking. Any
omissions or errors should be corrected by the observer. The third party
should then initial the sheet to confirm the quality control check has been
completed.
If a position-logging device has been used, the file created during the tow
should be checked for integrity. Where a USBL device has been used, it is
advisable to check that it has been working properly by plotting both the USBL
position and the corresponding ship’s position in a GIS. The plots should show
a paired track, with that of the USBL being astern of the ship. If the positions
are not contiguous, it could indicate a fault in the USBL system. It is also
advisable to check one or two time-stamped positions from the video overlay
against the USBL and ship’s time-stamped positions to ensure the correct
positional data has been fed to the video overlay. The position-logging files
should be named in such a way as to correspond to the video tow, and the
name(s) recorded in the metadata for the tow.

www.searchmesh.net
The video record should also be checked for integrity. Where a DVD has been
used, the file (‘Chapter’) should be closed and given an appropriate title.
6. Data storage and backup recommendations
It is advisable to use two video-recording platforms. That with the highest
quality (e.g.
digital video tape) should be regarded as the master copy, and
that with the lower quality (e.g.
DVD) as a backup. The master copy should be
archived on return to shore and should not itself be used during any video
analysis; copies of the master-tape should be made for this purpose.
Digital stills images should be copied to a portable media (i.e.
a CD or DVD)
to provide a backup in case the original files stored on PCs or network servers
become damaged or lost. Traditional film-based stills images should be
scanned into a digital format and saved to a portable media, and the film (or
slides) stored in archive-grade containers under appropriate conditions.
A ‘media catalogue’ should be kept, listing the labels and contents of all
recording media (DV tapes, DVDs, CDs, film, etc) produced during the survey.
It is important to recognise that magnetic and digital media (tapes, CDs,
DVDs, etc) have a limited life span, which varies with the quality of the media
and the conditions under which they are stored. Under adverse storage
conditions this life span can be reduced to <5 years for VHS tapes and <2
years for DVDs and CDs. These matters are dealt with more fully in the report
of the MESH Video Working Group: Seafloor Video Mapping: Collection,
analysis and interpretation of seafloor video footage for the purpose of habitat
classification and mapping (White et al. 2007). It is therefore advisable to have
a formal policy for copying and replacing archived material.
Metadata records from the field record sheet should be transferred to a
database.
www.searchmesh.net
7. Recommended logging information
The clearest way to give guidance on recommended logging information is by
annotated example. Figure 9 shows a copy of a pro-forma field recording
sheet used by Cefas for recording information (both data and metadata) for
video surveys (camera-sledge, drop-camera or ROV). The form comprises
three parts. The first records metadata about the sampling station, much of
which will be known before the gear is deployed. The second records
information about the sample; i.e.
the video material collected. The third
provides space to record brief notes on what was seen on the video monitor
during the sampling event. The fields at the foot of the page are for the quality
assurance procedure, showing who has completed the record, who checked it
and who entered the metadata onto the database. The subsequent table
(Table 1) explains the purpose of each field in the record sheet.
It is recognised that different surveys and institutes will have their own
methods of recording data and metadata relevant to each sampling. The
record sheet covers information that should be logged in the field and which
should accompany the sample data. Further, higher-level metadata will be
required relevant to the research programme, the cruise/campaign, the area
being surveyed and the analysis and management of the data. These are
detailed in the general section on metadata.

www.searchmesh.net
Figure 9. Completed video log sheet from a video station surveyed by Cefas in 2005.

www.searchmesh.net
Table 1. Explanation of the fields used in the Cefas Video Log sheet.
Explanation of fields used in the Cefas Video Log sheet
Station table
Section for recording metadata relevant to the sampling
station
Cruise code Unique identifier for the research cruise
Survey name Name of the survey, indicating location and year
Project code Unique code for the project undertaking the survey
Station number
Serial number of the sampling station (starts at 1 for the
first station sampled on the cruise)
Station code
Unique identifier for the sampling station (used during the
planning stage of the survey)
Date sampled Date on which the station was sampled
Tower log file
Filename for positional data (generated by ‘tower’
navigation system)
Log method
Whether position logging was by fixed time or fixed
distance
Log frequency Frequency of position logging (in seconds or metres)
Operator Initials of person operating the equipment
Vessel speed Speed over ground during the tow
Distance Distance covered during the tow
Gear Sampling gear used
Cable out
The length of the tow-cable deployed (for use with towed
camera sledge)
Station notes:
Free space for any additional notes on the station, such
as water depths or adjustment to the tow-cable length
Sample table
To record metadata relevant to the video recording
VHS video label &
owner
Label or serial number assigned to VHS tape;
who owns the VHS tape
DV or DVD label &
owner
Label or serial number assigned to digital videotape or
DVD;
who owns the DV tape or DVD
Number of camera
stills
Tally and total for the number of camera stills taken during
the dive
Stills folder name
Name assigned to folder where electronic stills images are
stored
Shoot
Time, position and/or fix number and depth at the time the
gear was deployed (optional)
SOL
(start of line)
Time, position and/or fix number, depth and videotape
counter details at the official start of the transect line (see
Figure 6)
EOL
(end of line)
Time, position and/or fix number, depth and videotape
counter details at the official end of the transect line (see
Figure 6)

www.searchmesh.net
Visual / Video
notes
To record brief field observations
Notes and sketches made here are valuable to remind the
observer of the broad nature of the sampling station
Quality control
footnote
To provide an audit trail giving information on who has
been involved with processing this data record
Completed by Person who completed the field record sheet
Checked by Person who checked the sheet was properly completed
Entered by
Person who input records to meta-database and
spreadsheets
For the complete metadata hierarchy (all 7 levels) refer to the Guidance
chapter ’How Do I Collect My Data‘
http://www.searchmesh.net/default.aspx?page=1657
and to the link at
http://www.searchmesh.net/Docs/GMHM3_Video_metadata.xls
. Examples
and explanatory notes are given for each of the fields (note that fields relevant
to other specific sampling techniques (e.g. grabs, trawls, acoustics, etc) are
not shown in this spreadsheet) Each of the 7 levels is set out on a different
worksheet, providing:
PROGRAMME
, SURVEY, AREA, STATION, TECHNIQUE, SAMPLE,
REPLICATE
8. Data cleaning and basic processing
8.1 Video and imaging techniques
Unlike remote sensing techniques, video and photographic observations do
not provide ‘streams’ of data that require cleaning and processing before
analysis can proceed. Some basic processing may, however, be required to
assist analysis.
8.1.1 Georeferencing
The bulk of any processing work will relate to the positional data files
associated with the video or photographic material. Positional data may need
to be corrected and/or processed in order to accurately georeference the
images. Where a USBL device has been used, it is advisable to plot both the
vessel track and USBL track in a GIS to check for erroneous data in the USBL
record. Errors may relate to the entire USBL data set, if the USBL track is
obviously wrongly positioned in relation to the vessel, or individual points in
the USBL record that clearly deviate from the main USBL track. If a USBL
device has not been used, then the actual position of any towed camera
should be calculated by layback. This is a simple application of Pythagoras’

www.searchmesh.net
Theorem and the measured offset between the dGPS antenna and the stern
gantry (or ‘A’ frame).
O = offset distance between dGPS antenna and towing point (stern gantry)
H = height of towing point above seabed
L = length of towing cable deployed
D = distance of trawl behind stern of vessel.
Pythagoras’ Theorum states that:
Simple algebraic rearrangement gives:
So, if the vessel is in 20 m of water and the towing point is 10 m higher than
the water line then H = 30 m. The length of cable deployed has been
measured as 60 m (~3 x water depth), so D can be calculated as:
If the distance between the dGPS antenna and the stern gantry is 12 m, then
the position of the trawl will be 52+12 = 64 m behind the position of the ship.
8.1.2 Removing irrelevant positional data
It is often the case that the position-logging devices are started some time
before the start of a transect line and stop sometime after the end of the line.
This data file should be trimmed to leave only positional data relevant to the
video material that will be analysed, especially if the positions are to be plotted
in a GIS.
8.1.3 Determining positions of still images
It is unlikely that still images will have positional information displayed in the
image. The position of each still image therefore has to be determined by
H
D
L
O
dGPS
antenna
Trawl
222
L
D
H
=
+
22
HLD −=
22
3060 −=D
9003600 −=D
2700=D
52D
≈

www.searchmesh.net
cross-referencing the time-stamp associated with the image (as given in the
EXIF or IPTC information associated with digital images) with the time records
in the positional data.
If images are not time-stamped, determining position may prove difficult. In
systems that have used both video and stills cameras, the bright flash of the
stills camera can sometimes be seen in the associated video records.
Consequently, the video record can be reviewed to determine a time for each
flash from the video overlay, which gives time/position data.
8.1.4 Video mosaics
There are a number of proprietary software applications that will produce a
mosaic from the moving video footage. These can be useful in helping to
interpret the video material, especially in determining the position of
boundaries between different habitat types. Mosaicking can be carried out
prior to full interpretation of the video record, see
Seafloor Video Mapping:
Collection, analysis and interpretation of seafloor video footage for the
purpose of habitat classification and mapping. (White et al. 2007) –
http://www.searchmesh.net/PDF/Video%20Working%20Group%20Report.pdf
8.1.5 Demobilisation notes
Once the survey has finished, the camera equipment, lighting and sledge
should be thoroughly washed with fresh water before the camera, lights and
cabling are removed from the sledge. These should then undergo routine
maintenance (drying, greasing, de-greasing, etc) before being packed away in
transit boxes.
Prior to disembarking the vessel, a check should be made that all media have
been accounted for and packed in a dedicated, waterproof transit container.
This should also contain backup copies of all associated electronic files (e.g.
positional data files, databases).
It is useful to hold a debriefing session to note any equipment or procedural
faults that will need to be addressed prior to the next survey.
8.2 Training
It is important that all personnel involved with the video survey are trained in
the proper use of the equipment and are familiar with the standard operating
procedure (SOP). It is useful to conduct such training during the test
deployment of the gear, so that everyone will be aware of how the equipment
has been set up and any minor modifications to the SOP that might have been
made in light of the operational capabilities of the vessel.
After the test deployment, a formal briefing should be given by the scientist-in-
charge, covering the purpose of the survey and detailing how the survey
operations and procedures will be conducted. This is particularly important if

www.searchmesh.net
the vessel is working a shift system, so that each shift operates the equipment
and follows the procedures in exactly the same manner. Staff should be
assigned individual responsibilities relating to the procedure, so that everyone
knows who is responsible for what actions within the team. The briefing
should also address what actions should be taken in an emergency (e.g.
if the
umbilical becomes snagged or broken).
8.3 Modifications of the general ROG relevant to drop-
cameras, ROVs and diver-held video
The general protocol outlined in section 8.1 is specific to the use of towed
sledges. It can be adapted for use with drop-cameras, ROVs and diver-held
video. The notes below outline relevant modifications to the ROG, and further
considerations required when using these particular techniques.
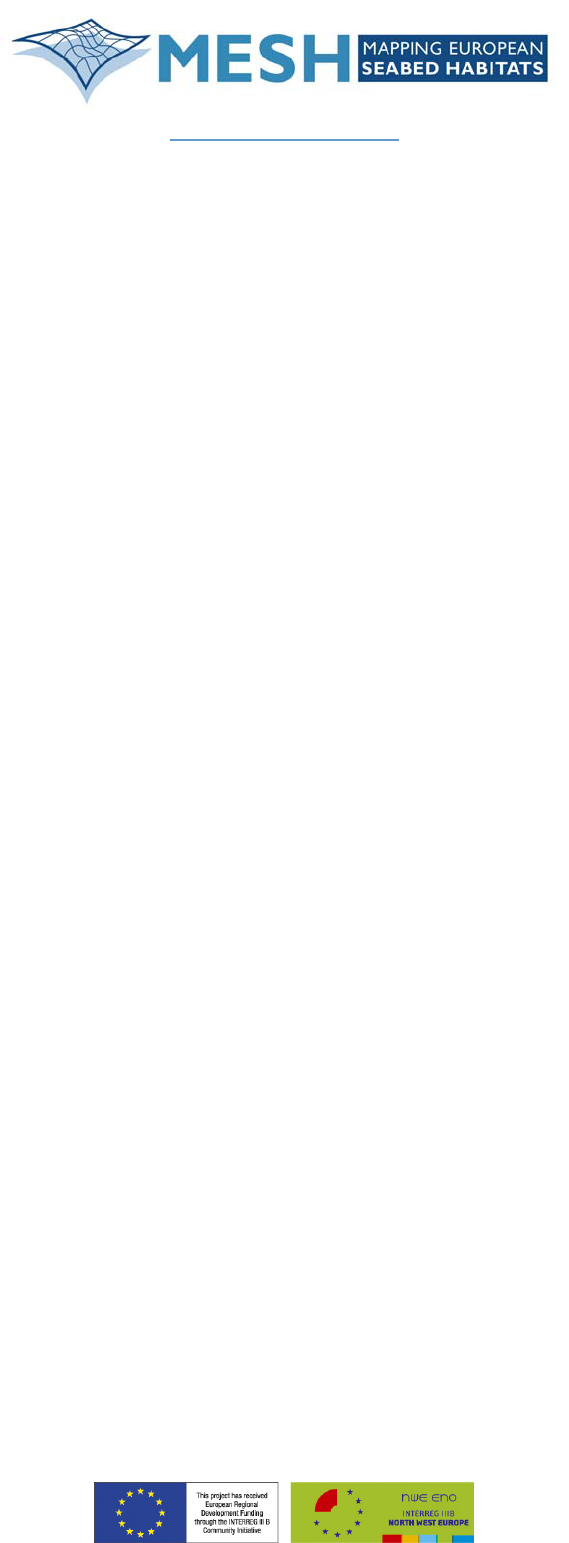
a) Drop-frame cameras (drop-cameras)
This term is used to refer to passive camera systems mounted in a frame
(Figure 10), which are not towed along the seabed, but suspended (usually by
wire) a short distance above the seabed. See section 3 of the MESH Review
of video techniques for a summary of the variety of systems available –
http://www.searchmesh.net/PDF/Video%20Working%20Group%20Report.pdf
.
Figure 10. Deploying a drop-camera frame. Note the four lasers mounted in a white
frame attached to the head of the camera (picture by Cefas).
The camera is usually mounted looking vertically downwards and lowered
over the side of the vessel on a wire, to a position just above the seabed. Any
pitching of the vessel in rough seas will be transmitted down the wire, causing

www.searchmesh.net
the camera to pitch up and down relative to the seabed. This effect can be
minimised by deploying the frame over the side of the vessel (amidships; as
close as practical to the centre of gravity of the vessel). The tendency for
currents to twist and drag the frame can be minimised by attaching a large
stabilising vane and a significant amount of weight to the frame.
The field of view of the camera will alter as height above the seabed changes,
so it is highly desirable to use a laser-scaling device (the only practical means
of providing a known scale object in a variable field of view – see Figures 2 &
10). The frame serves to protect the equipment against impacts, so it is
important that all cables are led though the top of the frame and no part of the
equipment or cable protrudes outside or below the frame.
In order to maintain the camera at an optimum height above the seabed,
constant adjustments will need to be made to the amount of cable that has
been paid out. This is most effectively achieved if the person operating the
winch (or paying out the cable) can see the real-time images being returned
from the camera. If this is not possible, instructions will need to be relayed to
them by the person observing the camera’s monitor, but this can significantly
reduce the amount of usable footage captured during a dive.
The drop-camera can be used for surveying transects, or for repeated ‘spot-
surveys’ at point locations. On transect surveys, the dive protocol is
essentially the same as used for towed video-sledges (see Figure 6).
However, the requirement to take still photographs at precise fixed intervals
needs to be relaxed, to ensure photographs are taken only when the camera
is at an optimal altitude for good imagery. Consequently, the stills
photographs should be taken
approximately every 60 seconds. For periods
between the ‘fixed interval’ shots, stills images should be taken
opportunistically to capture specimens and features of interest.
Transect surveys are best achieved with a vessel that has dynamic
positioning (DP) capability, as this can be used to drive the vessel (and hence
the camera) at a constant speed along a pre-determined transect line. If DP is
not available, the operation can be quite tricky, even for an experienced
skipper. It may be preferable not to attempt surveying a pre-determined
transect, but instead revert to an ad-hoc transect, allowing the vessel to drift
for a time (~20 minutes) with the tide.
For ‘spot-surveys’, the vessel is held at a fixed position, either by anchoring or
using DP, and the camera lowered to the seabed for a shorter period (<5
minutes). It would be normal to conduct a series of 5-10 such spot dives to
characterise a small area.
www.searchmesh.net
b) Remote operated vehicles (ROVs)
The ROV is an ‘active’ camera system, enabling a pilot to navigate the
camera during a survey. It is a particularly effective tool for habitat mapping as
the camera can be stopped at a point location to closely inspect features of
interest during transect or ‘spot-dive’ surveys (see MESH Review of Video
Techniques, section 4 ‘Existing standards & protocols’ –
http://www.searchmesh.net/default.aspx?page=1442’
). The images obtained
are frequently far higher in quality and information content than those from
towed sledges or drop-frames. However, ROVs are considerably more
expensive and vulnerable. Consequently, their safe operation requires great
attention to detail and procedure. Personnel need to be trained in piloting the
ROV, and this may involve a formal qualification procedure.
It is highly desirable that the ROV should have an acoustic tracking system so
that the material collected can be properly georeferenced (see MESH Review
of Video Techniques, section 5. ‘Spatial positioning and georeferencing’ –
http://www.searchmesh.net/default.aspx?page=1442
), otherwise positional
accuracy can be severely compromised (unless using ‘spot-dives’ that venture
little distance from the recorded position of the vessel).
Preparation of the ROV
ROVs can take up a lot of deck space, and adequate shelter must be supplied
for the deck control units that will be used to pilot the vehicle. Most ROV
systems run on DC power, so will require a specialist supply or AC/DC
converter/transformer. Set-up and pre-dive checks should be detailed by the
manufacturer, and will include maintenance checks on thruster motors as well
as camera systems. All personnel should be made aware of the risk of electric
shock and other dangers during live system checks performed on deck that
require power to be supplied to the ROV. If a laser-scaling system is being
tested, it should be pointed down towards the deck, not up in the air.
Adequate warning notices should be posted during such checks (Figure 11).

www.searchmesh.net
Figure 11. Warning notices displayed on ROV during live deck-testing.
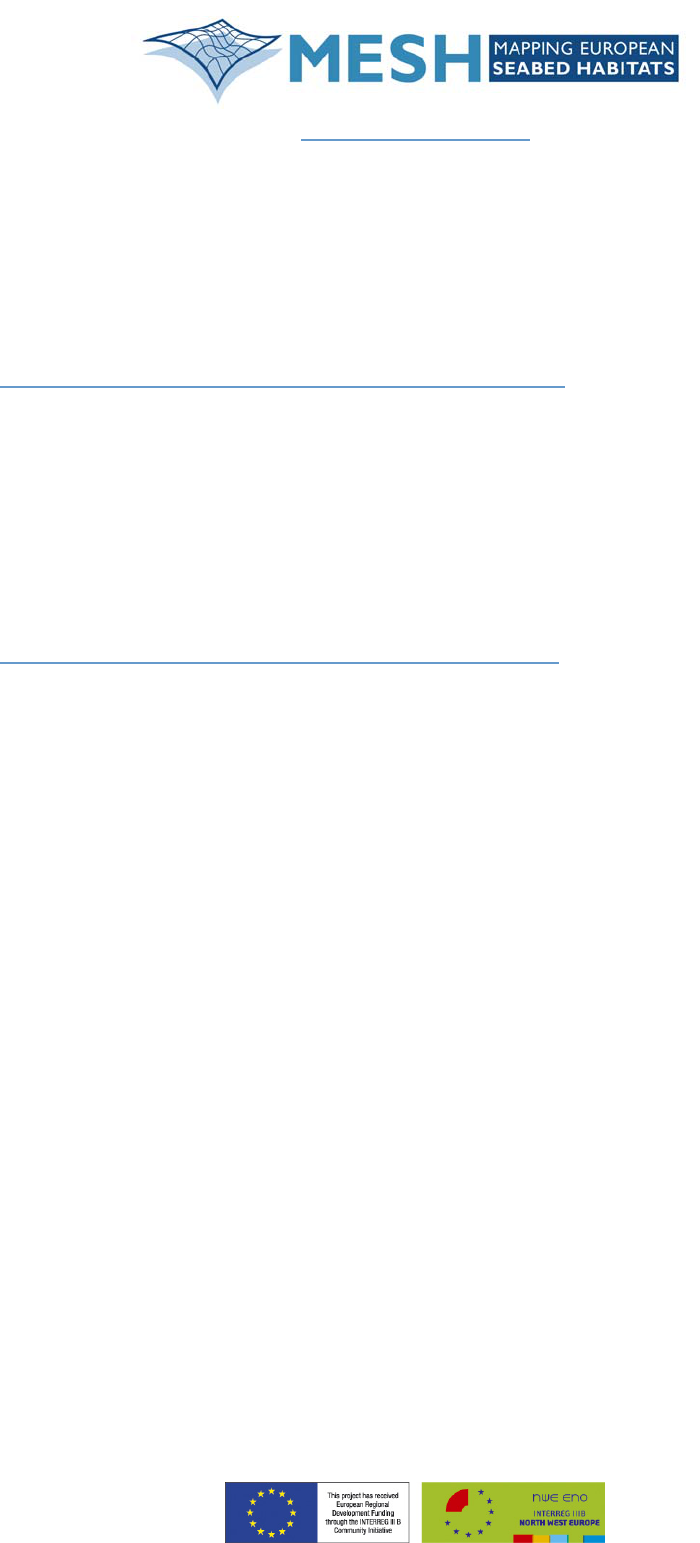
Deployment of the ROV
The deployment and recovery procedures should be agreed among all
personnel involved, according to the type of ROV and vessel used. The ROV
must be deployed while the vessel is stationary (or drifting with the tide). It is
safest to deploy it over the side of the vessel (Figure 12) well away from
anchor lines (forward) or propellers (aft). The ROV should not be powered-up
during deployment, as it will need to be manhandled. Several personnel will
be required for even a moderately small system (as illustrated here), deployed
with the assistance of a crane or davit:
• One person to manage the deployment and recovery;
• One person to pay out/recover slack umbilical cable and one person to
coil/uncoil the umbilical (these two people will also be needed to
manhandle and steady the ROV whilst suspended by the crane);
• One person to operate the crane/davit;
• One person to pilot the ROV;
• One person to co-pilot the ROV (attending to navigation and
communications with deck and bridge officers).
www.searchmesh.net
Figure 12. Manual handling of the ROV (left), and deployment by lifting strop and
crane (right). At this point (right) it is safe to power-up the vehicle and test thrusters,
prior to releasing the lifting strop. It is not safe to have the vehicle powered-up while it
is being handled (left).
The dive (or ‘flight’)
The precise details of the dive plan will depend on the specific purpose of the
mission, but some general guidelines are given below as an example of ‘good
practice’ and safe operation. The example given relates to a transect survey.
Once the ROV is released from the crane, dive to the seabed and rest the
vehicle there for a short while to test lights, cameras and other systems.
Acoustic tracking systems often need the ROV to be at some depth (10 m)
and distance from the ship before they begin to show the true position of the
ROV. Check the tracking system is working correctly as this will be vital for
accurate navigation. Once all systems are operating properly, leave the ROV
on the seabed for a minute or so to ensure a good dGPS position fix is
achieved at the start of the ‘flight’.
Begin the flight (Figure 13) by moving the ROV laterally away from the vessel
to a distant point; the objective being to allow controlled pay out of the majority
of umbilical cable that will be required for the dive. Then navigate the ROV to
the start of the transect. On arrival, rest the ROV on the seabed to gain a
good position fix and use the time to obtain video and still images of the area.
Fly the ROV down the transect line, stopping to inspect and photograph any

www.searchmesh.net
features of interest. At the end of the transect, rest the ROV on the seabed
again to ensure a good dGPS position fix.
Figure 13. Schematic representation of a ROV dive/flight to survey a transect (shown
in blue) on the starboard side of the support vessel.
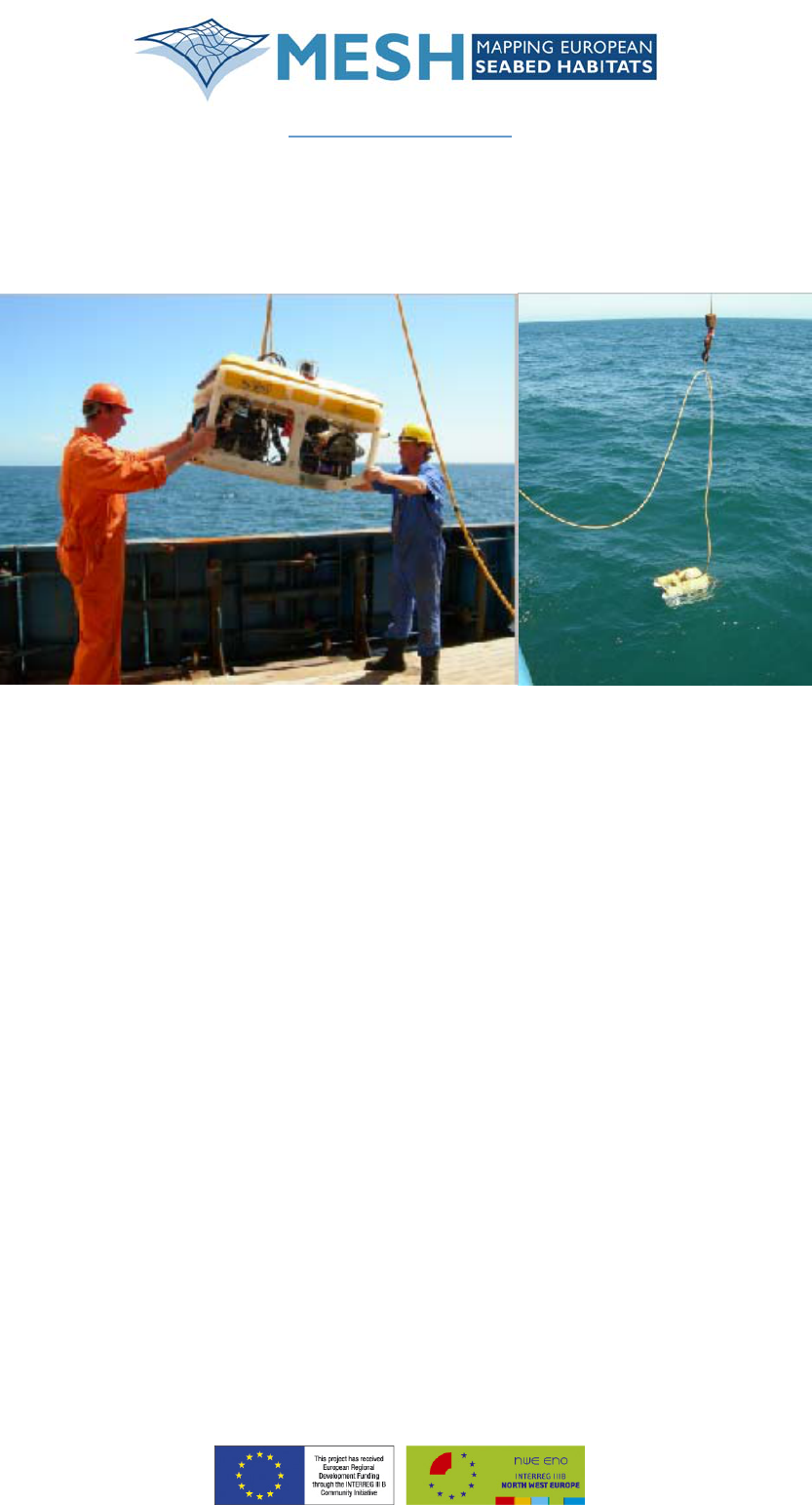
Recovery
When the transect has been completed, start recovering the ROV by flying it
back along the umbilical, while the deck crew take in the slack. To avoid
putting excessive strain on the umbilical, do not use it to drag the ROV back to
the vessel. Several personnel may be required to recover the slack umbilical,
especially if a strong tide is running (Figure 14). To avoid collision with the
hull, bring the ROV to the surface a short distance away from the vessel.
www.searchmesh.net
Figure 14. Deck crew recovering slack ROV umbilical. Note the last man in line is
charged with coiling the umbilical neatly on deck as it is recovered.
When the ROV is by the side of the vessel, use a boat hook to pick up the
lifting strop and attach it to the crane.
Before lifting the ROV from the water,
ensure that all systems are closed down and all power to the ROV has
been switched off (there is a risk of electric shock if manhandled while
power is on). Recover the ROV in a controlled manner, taking care to steady
it as it comes on board. Once aboard, make a visual inspection to assess any
damage of loosening of fitments.
If the umbilical becomes snagged on the seabed at any time, do not attempt
to free it by hauling on the umbilical. Instead, drive the ROV back along the
path of the umbilical to unwind it from the snagging point.
Be aware that during a dive, moderately strong tides (>2 knots) can have a
considerable pulling effect on the umbilical, to the extent that this force
overwhelms the propulsive force of the thrusters, making the ROV difficult to
pilot. The drag on the umbilical can be reduced, in part, by using a ‘clump
weight’ arrangement to lead the umbilical directly downwards over the side of
the vessel (as illustrated in the MESH Review of Video Techniques, section 4
‘Existing standards & protocols’ –
http://www.searchmesh.net/default.aspx?page=1442
). Such adverse
conditions can be avoided by choosing to time the ROV dives at slack tide.

www.searchmesh.net
c) Diver video
In some situations, the only practical way of obtaining video records from an
area is by using divers (SCUBA or snorkelling). Divers are able to move over
significant distances of seabed (over 100 m) per dive, and may facilitate
surveying at a number of scales, from detailed observation of quadrats to
broader-scale visual assessments over transects. These techniques are
detailed in the MESH Review of Diver Surveys
(http://www.searchmesh.net/default.aspx?page=1442
). The review mentions
several well-established guidelines on the conduct of diver surveys and
video/photographic techniques that complement those given here. In addition,
the reader is referred to the following references therein: Holt & Sanderson
(2001), Murray (2001), Brazier (2001), and Bullimore (2001). Only generic
guidelines will be given below.
When used specifically to collect video and photographic material for use in
habitat mapping, there are three basic designs for the diver survey:
1. Pre-laid transects: following a rope (or line) laid to mark the route of the
transect. The rope can be marked at known intervals to indicate fixed
distances where stills photographs are to be taken of quadrats;
2. Transects navigated along a fixed bearing (no pre-laid line);
3. ‘Spot-dives’ to characterise a restricted area or a known feature (e.g.
rock face).
Safe diving practice requires that the dive should start at the deeper end of
the transect and work towards the shallower end, and that the diver should not
make repeated ascents to the surface during the dive.
On pre-laid transects, both video and still images can be easily acquired. Two
divers are required, one to swim along the laid transect at constant speed
recording the video, and the other to follow behind taking photographs of
quadrats (at fixed intervals) and features of interest. If regulations require
divers to always dive in ‘buddy-pairs’, this may require two pairs of divers, as
the diver taking stills photographs will inevitably lose contact with the diver
taking the video. Alternatively, a single pair of divers can be used (one for
video, one for stills) if they remain working as a pair and the diver using the
video stops recording each time the pair reach a marked position on the
transect line, allowing the diver taking stills photographs to complete his/her
task before proceeding.
When not following a pre-laid transect, a diver responsible for navigating
along a fixed bearing should precede the diver using the video-camera. If the
video transect does not have to be completed in an uninterrupted run, then
the lead diver can be charged with selecting and photographing static quadrat
positions, ensuring the pair of divers remain together throughout the dive. If
the video transect has to be filmed in a single run, then still images will have

www.searchmesh.net
to be taken by another pair of divers, following the first. It will prove practically
impossible for this pair to follow exactly the same line as the first, so the still
and video images should be regarded as independent transects.
The use of laser-scaling devices on video-cameras is encouraged, as the field
of view can be very variable on diver-operated video. Great care must be
taken to ensure the lasers are not pointed at the eyes of fellow divers. Scale
objects can be introduced into still images by the photographer. If taking
images of quadrats, the quadrat itself provides a scale object and can be
marked with a graduated scale to aid analysis.
Georeferencing the images can prove problematic, unless the divers are
equipped with tracking devices that log their position, and these positions can
be related to a time stamp associated with the images. For pre-laid transect
lines, an alternative is to take position fixes at either end on the line as it is
laid. By physically marking the line at fixed intervals (say every 5 m),
intermediate positions along the line can be calculated. However, this
assumes that the rope will lie in a straight line on the seabed, but this is rarely
the case. Consequently, derived positions must be quoted to a lower level of
accuracy than positions acquired by dGPS fixes.
For transects that are navigated along a bearing, the entry and exit positions
of the divers can be fixed by dGPS. When diving from a boat, the position at
the start of the transect (when the divers enter the water) is likely to be more
accurate than at the end, as the divers may have drifted some distance on the
surface before they are reached by the support vessel. If the divers have
swum at a constant speed along a known bearing, then the distance along the
transect can be estimated from the elapsed time. However, in general,
positional accuracy is likely to be low (e.g.
+/-20 m on a 100-m long dive).
For spot-dives, position fixes can be taken by the support vessel as divers are
deployed and recovered. Some sites may already be charted (e.g.
wrecks).
For shore-based dives, the shore location can be fixed by dGPS and the site
of the spot-dive estimated to a reasonable accuracy by ‘dead reckoning
’
and/or ‘pilotage
’ (i.e. estimating the position by reference to local landmarks,
charts and maps).
Training will be required in the use of the video and stills cameras underwater.
The quality of material improves rapidly with experience. The dive leader must
ensure that responsibilities are evenly distributed among the dive team and
that the exact protocol for collecting video and photographic imagery is
understood by all team members. All divers must be appropriately trained and
hold the required formal qualifications.
