April 2024 1
STANDARD OCEAN MAPPING
PROTOCOL
Prepared by the
INTERAGENCY WORKING GROUP ON OCEAN AND COASTAL MAPPING
for the
NATIONAL OCEAN MAPPING, EXPLORATION, AND CHARACTERIZATION COUNCIL

April 2024 2
About the National Ocean Mapping, Exploration, and
Characterization Council
The Ocean Policy Committee (OPC) established the National Ocean Mapping, Exploration, and
Characterization (NOMEC) Council in June 2020 pursuant to the National Strategy for Mapping,
Exploring, and Characterizing the United States Exclusive Economic Zone.
1
The purpose of the
NOMEC Council is to coordinate Federal agency policy and actions needed to advance ocean
mapping, exploration, and characterization, and to support collaboration with both non-Federal
and non-governmental partners and stakeholders. The NOMEC Council develops and implements
multi-disciplinary, collaborative, and coordinated approaches to mapping, exploring, and
characterizing the Exclusive Economic Zone (EEZ) of the United States. The NOMEC Council
reports to the Ocean Science and Technology Subcommittee (OST), which provides support and
guidance for the NOMEC Council’s work as appropriate. The OPC will provide strategic direction
and facilitate interagency resolution of policy issues as appropriate.
About the Interagency Working Group on Ocean and Coastal
Mapping
The Interagency Working Group on Ocean and Coastal Mapping (IWG-OCM) is a working group
of the National Science and Technology Council (NSTC) Subcommittee on Ocean Science and
Technology (SOST) and also reports to the OST Subcommittee of the OPC via the NOMEC Council.
The SOST serves as the lead interagency entity for Federal coordination on ocean science and
technology. The IWG-OCM was established in 2006 to “facilitate the coordination of ocean and
coastal mapping activities and avoid duplicating mapping activities across the Federal sector as
well as with State, industry, academic, and non-governmental mapping interests.”
2
The IWG-
OCM focus areas, which include U.S. coasts, Great Lakes, and oceans out to the limits of the U.S.
EEZ and extended continental shelf, were established by the Ocean and Coastal Mapping
Integration Act of 2009 (OCMIA). The IWG-OCM also represents the ocean and coastal mapping
aspects of elevation on the Federal Geographic Data Committee’s (FGDC’s) 3D Nation Elevation
Subcommittee.
About this Document
Pursuant to Objective 2.1 of the Implementation Plan for the National Strategy for Ocean
Mapping, Exploring, and Characterizing the United States Exclusive Economic Zone, this
document is a standardized technical protocol for ocean and coastal mapping data that provides
national standards and best practices to guide all ocean mappers in data acquisition, processing,
and archiving. The goals of the document are to facilitate the widest access to, use of, and
1
https://www.noaa.gov/sites/default/files/2021-08/NOMEC%20Strategy.pdf
2
https://iocm.noaa.gov/reports/OCM_Nat_Strat_Action_Plan_Version_1.pdf
April 2024 3
integration of data; minimize duplication of effort; and maximize the efficient collection,
processing, publishing, preserving, and stewardship of as much ocean and coastal mapping data
as possible into publicly accessible archives, repositories, and databases.
Copyright Information
This document is a work of the United States Government and is in the public domain (see 17
U.S.C. § 105). Subject to the stipulations below, it may be distributed and copied with
acknowledgment to the NOMEC Council. Copyrights to graphics included in this document are
reserved by the original copyright holders or their assignees and are used here under the
Government’s license and by permission. Requests to use any images must be made to the
provider identified in the image credits or to the NOMEC Council if no provider is identified.
Published in the United States of America, 2024.

April 2024 4
NATIONAL OCEAN MAPPING, EXPLORATION, AND
CHARACTERIZATION COUNCIL
Co-Chairs
Benjamin Evans, NOAA
Jeremy Weirich, NOAA
Robert Thieler, USGS
Executive Director
Amanda Netburn, ONR
Executive Secretaries
Christine Hayes, NOAA
Thalia Eigen, NOAA
Members
Rodney Cluck, BOEM
Mike Pittman, BSEE
Sara Gonzales-Rothi, CEQ
Brett Seidle, DOD
Ann Shikany, DOT
Todd Boone, ODNI
Jim McManus, NSF
Kimberly Miller, OMB
Candace Nachman, USCG
Jack Kaye, NASA
INTERAGENCY WORKING GROUP ON OCEAN AND COASTAL
MAPPING
Co-Chairs
Ashley Chappell, NOAA
Jennifer Wozencraft, USACE
Jeff Danielson, USGS
Executive Secretariat
Amber Butler, NOAA
Members
Beth Wenstrom, BOEM
Heather Spence, DOE
Richard Fulford, EPA
Paul Rooney, FEMA
Pete Leary, FWS
Laura Lorenzoni, NASA
Henry Charry, NGA
Monique LaFrance Bartley, NPS
David Lindbo, NRCS
Brian Midson, NSF
David Savery, ODNI
Brendan Phillip, OPC
Allison Reed, STATE
John Farrell, USARC
Candace Nachman, USCG
Matthew Pawlenko, U.S.
Navy

April 2024 5
Authors
Chris DuFore, BOEM
Jennifer Miller, BOEM
Lora Turner, BOEM
Jeff Waldner, BOEM
Tim Battista, NOAA
Margaret (Peg) Brady, NOAA
Adrienne Copeland, NOAA
Mark Finkbeiner, NOAA
Chris Gardner, NOAA
Martha Herzog, NOAA
Steve Intelmann, NOAA
Michael Jech, NOAA
Matt Lawrence, NOAA
James J. Miller, NOAA
Christie Reiser, NOAA
Kate Rose, NOAA
Chris Taylor, NOAA
Paul Turner, NOAA
Carrie Wall, NOAA
Matthew Wilson, NOAA
Monique LaFrance Bartley, NPS
Jennifer Wozencraft, USACE
VeeAnn Cross, USGS
Bill Danforth, USGS
Jeff Danielson, USGS
Jim Flocks, USGS
Arnell Forde, USGS
Dave Foster, USGS
Jake Fredericks, USGS
Xan Fredericks, USGS
Jenna Hill, USGS
Fran Lightsom, USGS
Eric Moore, USGS
Wayne Estabrooks, U.S. Navy
April 2024 6
Table of Contents
About the National Ocean Mapping, Exploration, and Characterization Council .......................... 2
About the Interagency Working Group on Ocean and Coastal Mapping ....................................... 2
About this Document ...................................................................................................................... 2
Copyright Information .................................................................................................................... 3
NATIONAL OCEAN MAPPING, EXPLORATION, AND CHARACTERIZATION COUNCIL................... 4
INTERAGENCY WORKING GROUP ON OCEAN AND COASTAL MAPPING .................................... 4
Table of Contents ............................................................................................................................ 6
Abbreviations and Acronyms ........................................................................................................ 14
Standard Ocean Mapping Protocol Summary .............................................................................. 17
Personnel Safety ........................................................................................................................ 17
Environmental Compliance ....................................................................................................... 18
Standard Ocean Mapping Protocol Chapters ........................................................................... 18
Summary References ................................................................................................................ 19
Chapter 1: Data Management ...................................................................................................... 20
1.1 Introduction ......................................................................................................................... 20
1.2 Data Submission to Archives or Repositories ..................................................................... 20
1.3 Minimum Data Submission Requirements for National Archives ...................................... 21
1.4 Minimum Metadata Requirements .................................................................................... 21
1.4.1 Schema ..................................................................................................................... 22
1.4.2 Spatial Reference ..................................................................................................... 22
1.4.3 Core Metadata ......................................................................................................... 22
1.5 Recommended Core Metadata Fields for All Data Types ................................................... 23
1.5.1 File Data Submission Folder Structure ..................................................................... 29
1.6 Dataset (Data Theme) – Data Management Protocol ........................................................ 30
1.6.1 Bathymetry Data Management ............................................................................... 30
1.6.1.1 Minimum Requirements for Bathymetry Data Stewardship and Discovery ......... 30
1.6.2 Backscatter Data Management ............................................................................... 31
1.6.2.1 Minimum Requirements for Backscatter Data Stewardship and Discovery ......... 32
1.6.2.2 Guidance for Archiving Backscatter Data with NCEI ............................................. 32
1.6.3 Water Column Sonar Data Management ................................................................ 32
April 2024 7
1.6.3.1 Minimum Requirements for Water Column Sonar Data Stewardship and Discovery
............................................................................................................................................ 33
1.6.3.2 Guidance for Archiving Water Column Sonar Data with NCEI .............................. 33
1.6.4 Side Scan Sonar Data Management ......................................................................... 34
1.6.4.1 Minimum Requirements for Side Scan Sonar Data Stewardship and Discovery .. 34
1.6.4.2 Guidance for Archiving with NCEI .......................................................................... 34
1.6.4.3 Side Scan Sonar Data Formats ............................................................................... 34
1.6.5 Sub-Bottom Data Management ............................................................................... 35
1.6.5.1 Minimum Requirements for Sub-Bottom Data Stewardship and Discovery ......... 36
1.6.5.2 Guidance for Archiving with NCEI .......................................................................... 36
1.6.6 Magnetometry Data Management .......................................................................... 36
1.6.6.1 Magnetometer Protocol (Data Standard) .............................................................. 37
1.6.6.2 Minimum Requirements for Magnetometer Data Stewardship and Discovery ... 37
1.7 References ........................................................................................................................... 38
Bathymetry ....................................................................................................................... 38
Backscatter ........................................................................................................................ 39
Water Column Sonar ......................................................................................................... 39
Side Scan Sonar ................................................................................................................. 39
Sub-bottom ....................................................................................................................... 40
Magnetometer .................................................................................................................. 40
1.8 Additional Resources ........................................................................................................... 41
Chapter 2: Bathymetry .................................................................................................................. 42
2.1 Introduction ......................................................................................................................... 42
2.2 Overview ............................................................................................................................. 42
2.3 Bathymetric Data Sources ................................................................................................... 43
2.3.1 Single Beam Echosounder (SBES) ............................................................................ 44
2.3.2 Multibeam Echosounder (MBES) ............................................................................. 44
2.3.3 Interferometric Sonar .............................................................................................. 44
2.3.4 Lidar.......................................................................................................................... 45
2.4 General Protocols ................................................................................................................ 45
2.4.1 Data Management ................................................................................................... 45
April 2024 8
2.4.1.1 Raw Data Acquisition ............................................................................................. 45
2.4.2 Sensor Installation Surveys ...................................................................................... 45
2.4.3 Positioning ............................................................................................................... 46
2.4.3.1 Geodetic Control .................................................................................................... 46
2.4.3.2 Ellipsoidally Referenced Survey (ERS) Control ....................................................... 47
2.4.3.3 Tools ....................................................................................................................... 47
2.4.5 Resolution and Coverage Types ............................................................................... 48
2.4.5.1 Complete or 100% Coverage ................................................................................. 48
2.4.5.2 Set Line Spacing ..................................................................................................... 49
2.4.5.3 Trackline Data Coverage/Transit Data ................................................................... 49
2.4.5.4 Crosslines ............................................................................................................... 49
2.4.5.5 Tides and Water Levels .......................................................................................... 49
2.4.5.6 Uncertainty Standards ........................................................................................... 50
2.5 Multibeam Protocols ........................................................................................................... 50
2.5.1 System Geometry Review ........................................................................................ 50
2.5.2 Multibeam System Calibrations and Health Checks ................................................ 51
2.5.2.1 Inertial Motion Sensor Calibration ........................................................................ 51
2.5.2.2 Multibeam Calibration Patch Test ......................................................................... 51
2.5.2.3 Relative Backscatter Calibration ............................................................................ 55
2.5.2.4 Sound Speed Sensor Calibration ............................................................................ 55
2.5.2.5 Multibeam Speed Noise Testing ............................................................................ 55
2.5.2.6 Extinction Testing ................................................................................................... 56
2.5.3 Hardware Maintenance ........................................................................................... 56
2.5.3.1 Transducer Face Cleaning ...................................................................................... 56
2.5.3.2 Impedance Testing ................................................................................................. 57
2.5.4 Sound Speed Correction .......................................................................................... 57
2.5.4.1 Vertical Sound Speed Profiling............................................................................... 57
2.5.4.2 Surface Sound Speed Measurement ..................................................................... 58
2.6 Lidar Protocols ..................................................................................................................... 58
2.6.1 Collection Requirements.......................................................................................... 58
2.6.1.1 Collection Area ....................................................................................................... 58
April 2024 9
2.6.1.2 Quality Level .......................................................................................................... 58
2.6.1.4 Multiple Returns .................................................................................................... 61
2.6.1.5 Data Voids .............................................................................................................. 61
2.6.1.6 Spatial Distribution and Regularity ........................................................................ 61
2.6.1.7 Collection Conditions ............................................................................................. 61
2.6.1.8 Depth Range........................................................................................................... 61
2.6.2 Data Processing and Handling ................................................................................. 61
2.6.2.1 Time of GPS Data ................................................................................................... 62
2.6.2.2 Datums ................................................................................................................... 62
2.6.2.3 File and Point Source Identification ....................................................................... 62
2.6.2.4 Positional Accuracy Validation ............................................................................... 62
2.6.2.5 Relative Vertical Accuracy ...................................................................................... 62
2.6.2.6 Intrastate Precision (Smooth Surface Precision) ................................................... 62
2.6.2.7 Interswath (Overlap) .............................................................................................. 62
2.6.2.8 Absolute Vertical Accuracy .................................................................................... 63
2.6.2.9 Point Classification ................................................................................................. 63
2.6.2.10 Classification Consistency .................................................................................... 63
2.6.2.11 Intensity Values .................................................................................................... 63
2.6.2.12 Tiles ...................................................................................................................... 63
2.6.2.13 Point Duplication ................................................................................................. 64
2.6.3 Deliverables .............................................................................................................. 64
2.6.3.1 Metadata................................................................................................................ 64
2.6.3.2 Reports ................................................................................................................... 65
2.6.3.3 Classified Point Data .............................................................................................. 65
2.6.3.3.1 ASPRS LAS File Format..................................................................................... 65
2.6.3.3.2 Use of the LAS Withheld Bit Flag ..................................................................... 65
2.6.3.4 Bathymetric Lidar Waveform ................................................................................. 65
2.6.3.5 First-Return Surface (Raster Digital Surface Model) .............................................. 66
2.6.3.6 Bare-Earth Surface (Raster Digital Elevation Model) ............................................. 66
2.6.3.7 Breaklines ............................................................................................................... 66
2.7 References ........................................................................................................................... 66
April 2024 10
Chapter 3: Seabed and Lakebed Backscatter ............................................................................... 68
3.1 Introduction ......................................................................................................................... 68
3.2 Guidelines ............................................................................................................................ 69
3.2.1 Data Management ................................................................................................... 69
3.2.2 Raw Data Acquisition ............................................................................................... 69
3.2.3 Data Processing and Mosaic Generation ................................................................. 70
3.3 References ........................................................................................................................... 72
3.4 Additional Resources ........................................................................................................... 73
Chapter 4: Water Column Sonar ................................................................................................... 74
4.1 Introduction ......................................................................................................................... 74
4.2 Instrumentation .................................................................................................................. 76
4.2.1 Single Beam Echosounder Systems (SBES) .............................................................. 76
4.2.2 Multibeam Echosounder Systems (MBES) ............................................................... 77
4.3 Platforms ............................................................................................................................. 78
4.4 System Parameters ............................................................................................................. 78
4.5 System Calibration .............................................................................................................. 80
4.5.1 Accounting for Water Column Sound Speed and Motion ....................................... 80
4.5.2 Calibrating Single Beam Echosounders.................................................................... 81
4.5.3 Calibrating Multibeam Echosounders ..................................................................... 82
4.6 Quality Control .................................................................................................................... 83
4.6.1 Vessel Speed ............................................................................................................ 88
4.6.2 Sonar Synchronization ............................................................................................. 89
4.7 Data Formats ....................................................................................................................... 91
4.8 Data Interpretation and Derived Products ......................................................................... 92
4.9 Data Management .............................................................................................................. 93
4.10 References ......................................................................................................................... 94
Chapter 5: Side Scan Sonar ........................................................................................................... 99
5.1 Introduction ......................................................................................................................... 99
5.1.1 Data Management ................................................................................................... 99
5.1.2 Raw Data Acquisition ............................................................................................. 100
5.1.3 Data Processing and Mosaic Generation ............................................................... 101
April 2024 11
5.2 Target Detection ................................................................................................................ 102
5.3 Coverage Requirements .................................................................................................... 103
5.4 Spatial Referencing ............................................................................................................ 103
5.5 General Side Scan Data Acquisition Parameters ............................................................... 104
5.5.1 Frequency .............................................................................................................. 104
5.5.2 Navigation/Positional Uncertainty/Accuracy ........................................................ 104
5.5.3 Survey Speed .......................................................................................................... 105
5.5.4 Horizontal Range .................................................................................................... 105
5.6 System Configuration ........................................................................................................ 105
5.6.1 Towed System ........................................................................................................ 105
5.6.2 Vessel-Mounted System ........................................................................................ 106
5.6.3 Documenting System Configuration ...................................................................... 107
5.7 System Calibration ............................................................................................................ 107
5.8 Quality Control .................................................................................................................. 108
5.8.1 Quality Assurance and Confidence Checks ............................................................ 108
5.8.2 Environmental Influences ...................................................................................... 109
5.8.3 Operational Considerations ................................................................................... 109
5.9 Data Products .................................................................................................................... 110
5.9.1 Mosaics .................................................................................................................. 110
5.10 Other Resources .............................................................................................................. 111
5.11 References ....................................................................................................................... 112
Chapter 6: Sub-bottom Profiling ................................................................................................. 113
6.1 Introduction ....................................................................................................................... 113
6.2 Cruise Planning and Coordination ..................................................................................... 116
6.3 Navigation ......................................................................................................................... 117
6.4 System Types ..................................................................................................................... 117
6.4.1 Chirp ....................................................................................................................... 117
6.4.2 Boomers (Including the Bubble Gun, or Bubble Pulser Variant) ........................... 118
6.4.3 Sparkers ................................................................................................................. 118
6.4.4 Parametric Systems ............................................................................................... 119
April 2024 12
6.5 Seismic Data File Format ................................................................................................... 119
6.6 Acquisition ......................................................................................................................... 121
6.6.1 Trace Data .............................................................................................................. 123
6.6.2 Ping Rates ............................................................................................................... 124
6.6.3 Power ..................................................................................................................... 125
6.6.4 Gain ........................................................................................................................ 125
6.6.5 Noise ...................................................................................................................... 125
6.6.6 Storage ................................................................................................................... 125
6.6.7 Tracklines ............................................................................................................... 126
6.7 Safety ................................................................................................................................. 126
6.8 Data Management ............................................................................................................ 126
6.9 Resolution .......................................................................................................................... 127
6.10 Quality Control ................................................................................................................ 127
6.11 Processing ........................................................................................................................ 128
6.12 Archiving .......................................................................................................................... 130
6.13 References ....................................................................................................................... 131
Chapter 7: Magnetometry .......................................................................................................... 134
7.1 Introduction ....................................................................................................................... 134
7.2 General Magnetic Theory As It Relates to Anomaly Detectability.................................... 134
7.3 Factors that Influence Data Quality .................................................................................. 138
7.3.1 Environmental Sources of Noise ............................................................................ 138
7.3.1.1 Diurnal Variation .................................................................................................. 138
7.3.1.2 Geomagnetic Storms ........................................................................................... 139
7.3.1.3 Ocean Effect ......................................................................................................... 139
7.3.1.4 Subsurface Geology ............................................................................................. 139
7.3.2 Survey-Induced Sources of Noise .......................................................................... 140
7.3.2.1 Surge Effects ........................................................................................................ 140
7.3.2.2 Survey Vessel Interference .................................................................................. 140
7.3.2.3 Power Supply Interference .................................................................................. 140
7.3.2.4 Heading Error ....................................................................................................... 140
7.3.2.5 Dead Zones .......................................................................................................... 141
April 2024 13
7.4 Instrument Configuration and Selection ........................................................................... 141
7.4.1 Total Field Versus Other Types of Magnetometers ............................................... 141
7.4.2 Platforms ................................................................................................................ 141
7.4.2.1 Single Towed Instrument ..................................................................................... 141
7.4.2.2 Tandem Tow ........................................................................................................ 141
7.4.2.3 AUV/ROV/UAV Mounted ..................................................................................... 141
7.4.2.4 Configuration ....................................................................................................... 142
7.5 Sensitivity and Accuracy .................................................................................................... 143
7.5.1 Coverage Specifications ......................................................................................... 143
7.6 Resolution/Line Spacing Based on Survey Objectives ...................................................... 145
7.6.1 Unexploded Ordnance ........................................................................................... 145
7.6.2 Archaeological Survey ............................................................................................ 145
7.6.3 Geologic Mapping .................................................................................................. 146
7.7 Validation .......................................................................................................................... 147
7.8 Data Management ............................................................................................................ 148
7.9 Processing .......................................................................................................................... 148
7.9.1 Filtering of Time-Series Data .................................................................................. 148
7.9.2 Removal of Background Field ................................................................................ 148
7.9.2.1 Base Stations and Magnetic Field Observatories ................................................ 148
7.9.2.2 Gradient ............................................................................................................... 149
7.9.3 Anomalies .............................................................................................................. 150
7.9.3.1 Anomaly Detection from Single Line Data ........................................................... 150
7.9.3.2 Anomaly Detection from Contoured Data ........................................................... 150
7.10 References ....................................................................................................................... 153
Appendix A - Applicable Standards ............................................................................................. 154
Applicable Data Standards (attribute, accuracy, quality, archive, exchange (transfer, syntax),
service (distribution)) .............................................................................................................. 154
Applicable Data Guidelines / Protocols ................................................................................... 154
Applicable FGDC-endorsed Metadata Standards ................................................................... 155
Appendix B - Data Standard | Data Structure ............................................................................ 156
Magnetometer Attributes ....................................................................................................... 156
April 2024 14
Abbreviations and Acronyms
2D Two-Dimensional
(T) or nT Tesla unit
ADCP Acoustic Doppler current profilers
AGC Automatic Gain Control
AI Artificial intelligence
API Application Programming Interface
ASCII American Standard Code for Information Interchange
ASPRS American Society for Photogrammetry and Remote Sensing
AUV Autonomous Underwater Vehicle
AVG Angular Varying Gain
BIST Built-In Self-Test
BOEM Bureau of Ocean and Energy Management
BSAD Backscatter Angular Dependence
BSWG Backscatter Working Group
CO-OPS Center for Operational Oceanographic Products and Services
CRS Coordinate reference system
CTD Conductivity-Temperature-Depth
CW Continuous wave
dB Decibels
DEM Digital Elevation Model
DGPS Differential Global Positioning System
DL Deep learning
DPA Defined Project Area
DSM Digital Surface Model
EEZ Exclusive Economic Zone
EPSG European Petroleum Survey Group
ERS Ellipsoidally Referenced Survey
FE Footprint Extent
FAIR Findability, Accessibility, Interoperability, and Reusability
FGDC Federal Geographic Data Committee
FM Frequency modulated
GeoHab Marine Geological and Biological Habitat Mapping
GIS Geographic Information System
GMT Greenwich Mean Time
GNSS Global Navigation Satellite System
GPS Global Positioning System
GSF Generic Sensor Format
GUID Globally Unique Identifier
HRG High-resolution geophysical
Hz Hertz
I/O Input/Output
April 2024 15
IBM International Business Machines
ICES International Council for the Exploration of the Sea
IEEE Institute of Electrical and Electronics Engineers
IHO International Hydrographic Organization
IMU Inertial Measurement Unit
IOPG International Association of Oil and Gas Producers
ISO International Organization for Standardization
ITRS International Terrestrial Reference System
IWG-OCM Interagency Working Group on Ocean and Coastal Mapping
IWG-OEC Interagency Working Group on Ocean Exploration and Characterization
JALBTCX Joint Airborne Lidar Bathymetry Technical Center of Expertise
kHz Kilohertz
KM Kongsberg Maritime
Kp K-index (measures disturbance of Earth’s geomagnetic field)
kts Knots (unit of speed)
lidar Light Detection and Ranging
LUT Look-Up Table
MAC Multibeam Advisory Committee
MBES Multibeam Echosounder
MCS Multichannel Seismic
min Minute
ML Machine Learning
MMPA Marine Mammal Protection Act
ms Millisecond
MSL Mean Sea Level
MVP Moving Vessel Profiler
NCEI National Centers for Environmental Information
NAD North American Datum
NaN Not a Number (a numerical value that is undefined or unrepresentable)
NARA National Archives and Records Administration
NAVD North American Vertical Datum
NAVOCEANO Naval Oceanographic Office
Nf Nyquist Frequency
NGS National Geodetic Survey
NMAHS Norwegian Mapping Authority Hydrographic Service
NOAA National Oceanic and Atmospheric Administration
NOS National Ocean Service
NOMEC National Ocean Mapping, Exploration, and Characterization
NRP Navigation Reference Point
Nsr Nyquist Sampling Rate
NVA Non-vegetated Vertical Accuracy
OAIS Open Archival Information System
OCS Office of Coast Survey
April 2024 16
OER Office of Exploration and Research
PPP Precise Point Positioning
QA Quality Assurance
QC Quality Control
RMS error Root Mean Square Error
ROV Remotely Operated Vehicles
RTK Real-Time Kinematic
RX Receive Antenna
SBES Single Beam Echosounder
SBP Sub-Bottom Profiler
SCS Single-Channel Seismic
SEG Society of Exploration Geophysicists
SL Source level
SOG Speed Over Ground
SOMP Standard Ocean Mapping Protocol
SOP Standard Operating Procedure
SSS Side Scan Sonar
SVP Sound Velocity Profile
T Tesla
THU Total Horizontal Uncertainty
TIN Triangulated Irregular Network
TL Transmission Loss
TPU Total Propagated Uncertainty
TS Target Strength
TVG Time Varying Gain
TVU Total Vertical Uncertainty
TX Transmit Antenna
UAV Uncrewed Aerial Vehicle
uCTD Underway-Conductivity-Temperature-Depth
USACE U.S. Army Corps of Engineers
USBL Ultra-Short Baseline
USGS United States Geological Survey
USV Unmanned Surface Vehicles
UTC Coordinated Universal Time
UTM Universal Transverse Mercator
UXO Unexploded Ordnance
VVA Vegetated Vertical Accuracy
WKT Well-Known Text
XBT Expendable Bathythermograph
XSV Expendable Sound Velocity

April 2024 17
Standard Ocean Mapping Protocol Summary
Pursuant to Objective 2.1 of the Strategy and Implementation Plan in the National Strategy for
Mapping, Exploring, and Characterizing the United States Exclusive Economic Zone, this
document is a standardized technical protocol for acquisition, processing, and archiving of ocean
and coastal mapping data (NOMEC, 2020). The goals of the document are to facilitate the widest
access to, use of, and integration of data; minimize duplication of effort; and maximize the
efficient collection, processing, publishing, and stewardship of as much ocean and coastal
mapping data as possible into publicly accessible archives, repositories, and databases. National
data standards and best practices will be used, as required by the Geospatial Data Act of 2018
(FGDC, 2018).
Extending to the outer limits of the Exclusive Economic Zone (EEZ) and covering approximately
3.6 million square nautical miles, U.S. oceans, coasts, and Great Lakes waters comprise one of
the largest areas of national seafloor in the world. As of January 2024, according to the Progress
Report of Unmapped U.S. Waters released by the National Oceanic and Atmospheric
Administration (NOAA), only 52% of U.S. waters have been mapped to at least 100-meter
resolution (IWG-OCM, 2024). The remaining 48% of unmapped waters comprises data coarser
than 100-meter resolution, estimated seafloor topography based on models, or higher-resolution
mapping data that has not been shared for broader use.
Ocean mapping data are required to meet many Federal Government missions. Adhering to
established standards when collecting, processing, and archiving mapping data expands its utility
for multiple applications. To maximize the value of survey efforts, resources, data, and resulting
map products, the Interagency Working Group on Ocean and Coastal Mapping (IWG-OCM) works
with partners on mapping activities and data collection. Essential partners include States, Tribes,
academia, private industry, non-profit organizations, and many others. Given the variety of
mapping partners, a standardized protocol is needed to quickly and efficiently collect, process,
and publish as much data as possible.
Data acquisition strategies usually include multi-tool systems—such as a combination of sub-
bottom, magnetometers, side scan sonar (SSS), and bathymetric sonars—which promote survey
efficiency and cost savings (relative to collecting each dataset individually) as well as allowing for
a more comprehensive understanding of the survey area. Prior to commencing a geophysical
investigation, investigators should communicate with stakeholders regarding collaboration and
leveraging assets. Collaboration can increase the field of the study, reduce cost, enhance survey
capabilities and results, and develop future endeavors.
Personnel Safety
Marine surveys are inherently hazardous due to environmental conditions; deployment and
recovery of rigging and systems over water; and towing of cables and equipment. Onboard
hazards include electrical systems and movement of non-stabilized objects. The safety of the
crew depends on extensive training, experience, and constant vigilance. Federal agencies have
standards and guidelines for field activities and requirements for staffing of vessels and

April 2024 18
operational procedures (Yobbi et al., 1995). For example, the U.S. Department of Interior
publishes handbooks on techniques for investigations in aquatic environments and other
technical procedures (DOI, 1993; USGS, 2015). These resources are used to inform and ensure
crew safety. Because maritime and aerial activities are innately dangerous, safety shall always be
the primary consideration when conducting any operations. Data acquisition operations shall not
be attempted unless conditions are deemed favorable and safe.
Environmental Compliance
The following chapters provide guidance on conducting a wide variety of data collection and field
activities performed from crewed vessels and aircraft, as well as remotely operated or
autonomous vehicles. Participants shall follow all environmental laws relevant to the performed
field activities. Participants should consult their agency-specific environmental compliance
policies and procedures for guidance on how to meet these requirements.
Standard Ocean Mapping Protocol Chapters
The Standard Ocean Mapping Protocol (SOMP) is organized into the following seven chapters.
Chapter 1: Data Management covers methods for effective data management and
stewardship, metadata records, and archive techniques, with the intent of promoting
data accessibility and utility by a broad spectrum of users, including the public.
Chapter 2: Bathymetry focuses on procedures for the collection, processing, and delivery
of bathymetric data, such as that acquired by sonar systems (multibeam, single beam,
phase-discriminating) and light detection and ranging (lidar) systems. This chapter
summarizes best practices for system setup, calibration, and maintenance; data
resolution, range, and survey coverage; positioning and spatial reference; sound speed
correction; tides and water levels; quality assurance/quality control (QA/QC) techniques,
accuracy, and uncertainty; data processing and handling; and general gridded data
specifications.
Chapter 3: Seabed and Lakebed Backscatter covers standard backscatter acquisition and
processing methods, acoustic signal corrections, and image processing steps. This chapter
describes backscatter, its existing challenges in data usage, protocols to apply, and
information that should be documented during surveying and processing. The chapter
advocates the Marine Geological and Biological Habitat Mapping (GeoHab) Backscatter
Working Group (BSWG) publication Backscatter Measurements by Seafloor-Mapping
Sonar: Guidelines and Recommendations (Lurton and Lamarche, 2015) as best practices.
Chapter 4: Water Column Sonar focuses on the collection, processing, and delivery of raw
and interpreted backscatter from single beam echosounders (SBES) and multibeam
echosounders (MBES). This chapter summarizes best practices for system configuration
and calibration; operating frequencies and depth ranges; QA/QC techniques; analysis and
interpretation of backscatter and derived products; and file formats.

April 2024 19
Chapter 5: Side Scan Sonar concentrates on the collection, processing, and delivery of
SSS data. This chapter summarizes best practices for system configuration and calibration;
general data acquisition parameters (e.g., range scales, frequencies, ping rates, survey
speed); data resolution and survey coverage; positioning and spatial reference; target
detection; QA/QC techniques, accuracy, and uncertainty; and data processing, mosaic
generation, and derivation of products.
Chapter 6: Sub-bottom Profiling covers common system types and describes the
standard operating procedure (SOP) for the use of single-channel acoustic systems that
commonly operate in the 0.2 to 24 kilohertz (kHz) frequency range to remotely image
seafloor surface morphology and near-surface stratigraphy. Topics include practical
survey design; conventional acquisition procedures and parameters; data resolution;
QA/QC techniques; processing protocols; data formats; and publication of sub-surface
imaging data.
Chapter 7: Magnetometry focuses on general magnetic theory as it relates to anomaly
detectability; factors that influence data quality; instrument selection, configuration,
testing, and calibration; data sensitivity and coverage specifications; resolution/line
spacing based on survey objectives; and data validation.
The SOMP leverages expertise in the field of ocean and coastal mapping across sectors (including
government, industry, and academia), as well as existing mapping standards and procedures. This
document will be updated by the IWG-OCM every 5 years to stay current with technological
advancements.
For any questions about the SOMP or updated URLs, email iwgocm.staff@noaa.gov.
Summary References
Federal Geographic Data Committee (FGDC). 2018. “Geospatial Data Act of 2018.”
https://www.fgdc.gov/gda/geospatial-data-act-of-2018.pdf.
Interagency Working Group on Ocean and Coastal Mapping (IWG-OCM). 2022. “Progress
Report: Unmapped U.S. Waters.” https://iocm.noaa.gov/documents/mapping-progress-
report2022.pdf.
Lurton, X. and G. Lamarche. 2015. Backscatter Measurements by Seafloor‐Mapping Sonars:
Guidelines and Recommendations. https://geohab.org/wp-
content/uploads/2018/09/BWSG-REPORT-MAY2015.pdf.
National Ocean Mapping, Exploration, and Characterization Council of the Ocean Science and
Technology Subcommittee and Ocean Policy (NOMEC). June 2020. “National Strategy for
Mapping, Exploring, and Characterizing the United States Exclusive Economic Zone.”
https://oeab.noaa.gov/wp-content/uploads/2021/01/2020-national-strategy.pdf.
U.S. Geological Survey. 2015. National Field Manual for the Collection of Water-Quality Data.
U.S. Geological Survey Techniques of Water-Resources Investigations, Book 9.
https://pubs.er.usgs.gov/publication/twri09.
Yobbi, D.K., Yorke, T.H., and R.T. Mycyk. 1996. A Guide to Safe Field Operations. U.S. Geological
Survey Open-File Report 95-777. https://pubs.usgs.gov/of/1995/of95-777/ofr95777.pdf.

April 2024 20
Chapter 1: Data Management
VeeAnn Cross, USGS
Jim Flocks, USGS
Arnell Forde, USGS
Monique LaFrance Bartley, NPS
Fran Lightsom, USGS
Christie Reiser, NOAA
Kate Rose, NOAA
Lora Turner, BOEM
Paul Turner, NOAA
Carrie Wall, NOAA
Matthew Wilson, NOAA
1.1 Introduction
The ocean mapping community has made significant progress in effective data stewardship over
the last decade, yet it still lags behind other scientific communities in this area. Marine data
collectors sometimes lack the awareness, resources, and/or expertise to fully implement best
data management practices on their own, resulting in data being improperly documented, kept
out of the public realm, and/or lost. More recently, the expense and difficulty of collecting data
and the recognition that these data are used for multiple purposes have prompted efforts from
funding agencies and data management communities to overcome these obstacles. The GO-FAIR
Initiative, for example, is a stakeholder community that developed and promotes the FAIR
Guiding Principles for scientific data management and stewardship to assist data holders in
making their data Findable, Accessible, Interoperable, and Reusable (GO FAIR, n.d.). These
principles apply to projects and datasets of any size and have been embraced by large
international programs, such as the Integrated Ocean Observing System (NOAA IOOS, n.d.).
Access to tools such as metadata editors and data packaging software have been developed to
reduce data management barriers and help data collectors meet the requirements for data
documentation, preservation, and access.
Using data standards (Appendix A) and metadata promotes data reusability, increases
interpretability, clarifies ambiguous meanings, and reduces redundancy/duplication of efforts.
This chapter provides overarching guidance and recommendations for effective data
management and stewardship, specifically, the metadata and archival techniques necessary for
data to be stored and maintained for access and understandability now and into the future by a
broad spectrum of users, including the general public. This chapter does not address specific
manufacturers or use cases.
1.2 Data Submission to Archives or Repositories
Submission of raw data, processed data, and products to data archives or repositories is strongly
encouraged to meet the data documentation, preservation, and access goals outlined above.
Data repositories are either a space used to store records of continuing value or an institution
focused on the care and storage of those records. Many universities, States, and Federal agencies
host their own repositories.
In the United States, National Archives are data repositories owned and maintained by the
Federal Government to meet the data preservation requirements of the National Archives and

April 2024 21
Records Administration (NARA). While Federal agency archives do not formally meet that
definition, NOAA National Centers for Environmental Information (NCEI) does meet several
definitions for the term and is referred to as both an archive and a repository. NCEI also adheres
to the Open Archival Information System Reference Model (OAIS) (ISO Standard 14721) to ensure
that data are independently understandable for long-term preservation (OAIS Reference Model,
n.d.).
Although the guidelines presented in this chapter are widely used best practices that should be
considered for all datasets, regardless of where they are stored, data providers should contact
the appropriate repository or archive directly for specific submission requirements.
1.3 Minimum Data Submission Requirements for National
Archives
Data must have accompanying metadata and be provided in the requested format(s) and folder
structure (See Chapter 1.5 for NOAA NCEI example) before publication and archival. Also,
processed data must be evaluated, and properly quality assured and controlled by a subject
matter expert.
Data submitted to the NOAA NCEI Archive (NOAA NCEI, n.d. a) include:
• Data
o See applicable chapters below (Chapters 2–7)
o See Appendix B for formats by data type
• Metadata
o See Chapter 1.4 for minimum metadata requirements
o See Chapter 1.5 and Table 1.1 Minimum metadata recommended for usability
and archiving for all data themes. for recommended metadata fields for all data
types outlined in Chapters 2–7
• Standardized folder structure
o See Chapter 1.5.1 for NCEI example
1.4 Minimum Metadata Requirements
Data are often collected and processed using proprietary software, and calibration settings are
instrument-dependent and vary with local and environmental conditions. Therefore, detailed
documentation of specific settings and parameters in metadata records is critical to assess data
for further processing and interpretation at any point in time. Standardization of metadata is
accomplished by using a set of defined information or “attribute” fields arranged in a specific,
machine-readable structure or “schema.” This enables the organized storage of metadata
records in searchable databases. Although different organizations employ or endorse different
metadata schema (Appendix A), most require a common core set of attributes and are, to some
extent, interoperable.

April 2024 22
1.4.1 Schema
Repositories and archives maintained by U.S. Federal agencies, including NOAA NCEI, United
States Geological Survey (USGS), and other cooperative institutes, require that data submissions
include geospatial metadata in a standard endorsed by the FGDC. FGDC-endorsed schemata
include the Content Standard for Digital Geospatial Metadata and several International
Organization for Standardization (ISO) geographic metadata standards such as ISO 19139/19115
and extensions (Appendix A).
These schemata contain mandatory and optional fields to document attributes, including
information regarding the survey (e.g., dates of data collection, sensor(s) used, vessel and cruise
names), data collection and processing steps, geographic reference, and contacts for lead
participants:
• Descriptions of the ISO content and organization and guidance for writing metadata
(NOAA NCEI, n.d. b; USGS, 2021).
• USGS and NOAA resources include metadata templates with guidance documents.
Additionally, NOAA hosts an ISO Workbook (NOAA NODC, 2012).
• ISO Explorer (a web-based comprehensive explorer for ISO 19115 [ESIP, 2017] and
19115-2 [NOAA NGDC, 2020]) both act as implementation guides.
1.4.2 Spatial Reference
Georeferenced geospatial data should refer to the most current horizontal datum from the
National Spatial Reference System. Projection information must be defined in the feature class
so that the data project accurately when imported into a geographic information system (GIS).
Geographic data must use the most recent adjustment and epoch of the North American Datum
(NAD) of 1983 (currently NAD83(2011), Epoch 2010.00) in either (Universal Transverse Mercator
[UTM]; eastings/northings) with the zone specified or as geographic coordinates
(latitude/longitude), and adequately documented. Note: Both horizontal and vertical datums will
be replaced by the North American Terrestrial Reference Frame of 2022 (NATRF2022), based on
the Global Positioning System (GPS)/ Global Navigation Satellite System (GNSS) and a GRAV-D-
based geoid (GEOID2022) (NOAA NGS, n.d.).
1.4.3 Core Metadata
1.1 lists and defines the minimum, or core, set of metadata attribute fields that are common
across all data types in the SOMP and required for data submission to many data repositories
and archives. These metadata attributes should be considered prior to data collection or
processing to ensure that the information is documented before or at the time of
collection/processing. Documenting metadata during the project is strongly encouraged as a best
practice and facilitates a more accurate and detailed record. The following chapters will discuss
additional required metadata fields specific to each data type.

April 2024 23
All survey data, including raw and/or processed mapping data and supplementary data, any
associated products, and metadata should be archived together in cruise- or mission-specific
directories.
Raw and processed data file formats are currently dominated by industry-standard proprietary
acquisition and processing software. Any data collected or processed using proprietary software
should be provided in open-file formats to the greatest extent possible (either instead of or in
addition to the proprietary format). Maintaining proprietary formats allows for new processing
techniques to be implemented and preservation of the whole, raw dataset. However, this
practice can significantly increase data storage needs and effort (e.g., to convert files), so users
should decide—prior to acquisition—what file formats will be preserved.
Supplemental data such as sound speed profiles, tides, vessel offsets, vessel track
lines/navigation files, cruise reports, log/field notes, etc. are valuable information that provide
context and help users fully understand the settings and environment in which the data were
collected. Inclusion of all relevant information can aid in the most accurate analysis of the data.
Supplemental data can be recorded in a variety of formats and are typically (and preferred) in
non-proprietary formats (e.g., ASCII, CSV, PDF). Data products developed from the mapping data
(e.g., mosaics, rasters, digital elevation models, maps) are also recorded in a variety of formats
and are typically (and preferred as) open-file or easily accessible formats.
1.5 Recommended Core Metadata Fields for All Data Types
Table 1.1 Minimum metadata recommended for usability and archiving for all data themes.
A. General Information
Information Field
Example Text
Description
Survey Name
NF1309
Typically, “shipID, year, cruise number,”
survey cruise ID/name.
Vessel Name
Nancy Foster
Name of survey vessel/ vessel name.
Chief Scientist
Transit or John Smith
Transit or chief scientist(s) and
affiliation(s).
Chief Scientist
Organization
USGS
Transit or agency(ies) / program(s) for
which survey is conducted.
Departure Port
US - Puerto Rico - San
Juan
City, state for U.S. ports. City, country for
international ports, vessel departure
port(s).
Arrival Port
US-Charleston, SC
City, state for U.S. ports. City, country for
international ports, vessel arrival port(s).
Ship Owner
NOAA
Entity that owns the survey vessel.
Project Name
Corals in the Florida
Keys
Specified project name or “Transit.”
Source
NOAA
Source organization of data being
provided.

April 2024 24
B. Reference
Information Field
Example Text
Description
Citation
NOAA (2010)
Bibliographic information to reference the resource.
Ex: Cite as: NOAA (2010): Multibeam collection for
M1907_NF_10: Multibeam data collected aboard
Nancy Foster from 16-Mar-10 to 15-Apr-10, Charlotte
Amalie, U.S. Virgin Islands to San Juan, Puerto Rico.
NOAA National Centers for Environmental
Information. [url], [access date].
C. Time
Information Field
Example
Text
Description
Start Date
2013-09-10
Date only. YYYY-MM-DD, acquisition start date (ISO
8601).
End Date
2014-10-28
Date only. YYYY-MM-DD, acquisition end date (ISO
8601).
Start Time
01:12:22
Time, as XX:XX:XX, hh:mm:ss, in UTC (Coordinated
Universal Time), acquisition start time.
End Time
17:30:10
Time, as XX:XX:XX, hh:mm:ss, in UTC, acquisition end
time.
D. Location
Information Field
Example Text
Description
Coordinate System
Horizontal: NAD83 UTM
Zones 17-20
Vertical: NAVD88
Information about the spatial reference system
used. Coordinate system/horizontal
datum/vertical datum(s) used for raw and
processed data. Describe processing steps used
to shift coordinate system or datum, if
different from raw data.
Spatial Domain
Latitude: 46.00 to 49.50
Longitude: -84.00 to -
92.20
The geographic areal domain of the dataset,
i.e., what geographic area does the dataset
cover? Provide limits of dataset coverage in
latitude and longitude values in the order of
westernmost, easternmost, northernmost, and
southernmost. List Latitude first followed by

April 2024 25
Longitude to match nautical standards
(Lat/Long).
Horizontal Datum
NAD83
Information about the horizontal reference
frame and epoch. If projected data, state
projection zone.
Vertical Datum
MLLW
State information about the vertical coordinate
reference system (CRS) and epoch. A vertical
datum is technically a surface of zero-elevation
to which heights of various points are referred
in order that those heights be in a consistent
system. More broadly, a vertical datum is the
entire system of the zero-elevation surface and
methods of determining heights relative to
that surface. Over the years, many different
types of vertical datums have been used. The
most dominant types today are tidal datums
and geodetic datums.
Sensor Altitude
n/a
Sensor altitude (if towed system).
E. Content
Information Field
Example Text
Description
Entity and Attribute
Information
See SOMP
Appendix A
Information about the physical parameters and other
attributes contained in a resource. Details about the
information content of the data-sets, including the
entity types, their attributes, and the domains from
which attribute values may be assigned, and data
fields defined.
F. Credit
Information Field
Example Text
Description
Dataset Credit
NOAA
Recognition of those who contributed to the dataset,
cited authors, publishers. Who produced the dataset?
Who are the originators of the data-set?
Point of Contact
Nigel Smith
Contact information for an individual or organization
that is knowledgeable about the data-set, name,
affiliation, email, phone. To whom should users
address questions about the data?

April 2024 26
G. Purpose
Information Field
Example Text
Description
Abstract
Text Summary
Brief narrative summary of the resource/dataset’s
contents. Abstract narrative should include information on
general content and features; dataset applications: GIS,
CAD, image, database; geographic coverage: country/city
name; time period of content: begin and end date or single
data; and special data characteristics or limitations.
Description = abstract and purpose, a characterization of
the data-set, including its intended use and limitations.
Brief narrative summary of the dataset’s contents.
Purpose
Text Summary
Summary of the intentions for which the dataset was
developed. Purpose includes objectives for creating the
dataset and what the dataset is to support. For example:
nautical charting, habitat mapping, geologic
interpretation, modeling, etc.
H. Sensors
Information Field
Example Text
Description
Acquisition
Info
Information about instruments, platforms, operations, and
other information of data acquisition? How were these data
collected?
Navigation
DGPS or GPS
Equipment used in determining data positioning, including
accuracy of system (e.g., the make/model). For example,
Trimble R10 Integrated GNSS system RTK GPS or Applanix
POS MV GNSS-aided inertial positioning system.
Instrument
Reson 7125
Information about instruments, platforms, operations and
other information of data acquisition. How were these data
collected? Description of the instrument(s), and sensor(s).
Report data resolution if applicable to the data type. Vessel
configuration, survey vessel dimensions (length, width,
draft) and applied system offsets are critical and may or may
not be documented in the raw data, depending on
acquisition setup/software. What platforms were the
instruments on? Ex: Geometrics G-882 Digital Cesium
Marine Magnetometer

April 2024 27
I. Processing
Information Field
Example Text
Description
Processing Steps
Text Summary
Paragraph describing processing performed on data, including
software (and version) used, if any—list of process steps,
details of data preparation, cleaning, transformation, etc.
Report data resolution if applicable to the data type.
J. Quality
Information Field
Example Text
Description
Data Quality
Information
Info
Information about the quality and lineage (including
processing steps and sources) of a resource such as attribute
accuracy, logical consistency report, or completeness report.
Describe any constraints that may have affected data quality
during collection (e.g., sea state, software or hardware
issues), scope, report, and lineage. How well have the
observations been checked? How accurate are the
geographic locations, heights, or depths? Where are the gaps
in the data? What is missing? How consistent are the
relationships among the data? What is the quality of this data
set?
Patch Test &
System
Calibration
Step 1, Step
2…
Description of steps taken to ensure the system is calibrated
including time and location of calibration. Complete listing of
calibration corrections applied to data. Details of process
used to refine system alignment / report. Include ‘pre-’ and
‘post-calibration’ settings for context and traceability to
previous and later calibrations.
Settings
Sonar settings
include
Description of settings used during data acquisition.
K. Distribution – Access – Handling
Information Field
Text Summary
Description
Data license
identifier
License identifier
(e.g., CC0-1.0, CC-BY-
4.0)
Assigning a universal data license is highly encouraged,
as it removes any ambiguity about how the data may
be used, thus facilitating streamlined data handling.
Most common licenses in use are: (1) Creative
Commons Public Domain Dedication (CC0-1.0), which
legally removes copyright from the data, thus ensuring
it achieves maximum reach and use. Credit given to
the provider is a standard industry practice and
courtesy. (2) Creative Commons Attribution 4.0

April 2024 28
International (CC-BY-4.0), which allows for data to be
used for any purpose but legally requires credit be
given (i.e., attribution), so it is slightly more restrictive.
Data license URL
URL (e.g.,
https://creativecom
mons.org/publicdom
ain/zero/1.0/legalco
de,
https://creativecom
mons.org/licenses/b
y/4.0/legalcode)
The URL to the legal code of the data license.
Access Constraints
Yes or No
This field is only necessary if a data license has not
been assigned. Are there legal restrictions on access or
use of the data? This field should include information
about constraints on the use of the metadata and the
resource it describes; limitations, restrictions, or
statements on the resource fitness for use; temporary
data access restrictions (i.e., public, proprietary,
sensitive, restricted). ("Access Constraints" for
"Proprietary" describe any components of the raw or
processed data or mosaics that are proprietary [e.g.,
raw data files, processed data files, navigation files].
Note that backscatter raw and processed data file
formats are currently dominated by industry-standard
proprietary acquisition software, whereas the
resulting mosaic or raster data are typically an open
data format.)
Distribution
Info
Information about the distributor of and options for
obtaining the data-set. Who distributes the data?
Responsible Party
Name
Who wrote the metadata?
DOI
DOI:
10.7289/V56T0JNC
Digital Object Identifier. If DOI is not provided, NCEI
will create one upon request.
Outside Link
http://www...
Web link to additional information regarding cruise,
project, or funding. What are the URLs and other
online resources associated with this data set?
Comments
Proprietary hold
until Oct 1, 2014
General comments regarding the cruise or dataset, if
any.

April 2024 29
1.5.1 File Data Submission Folder Structure
One of the essential components of sound data management is an established filing (directory)
structure. Established file plans demonstrate consistency and continuity in record keeping (Figure
1.1).
Figure 1.1. Data Type Folder Structure: an example of the folder structure from NCEI for submitting
various data types.
compilations (grids, etc. from more than one cruise or instrument)
nonpublic
<dataset> (ex: data_type + provider)
documents
metatdata
ancillary
data
<platform>
nonpublic
<cruise>
documents (ex: cruise_report.pdf, gzip files individually for flexibility in adding files)
metadata (ex: <cruise>.xml, <dataset>.xml, gzip files individually for flexibility in adding files)
ancillary (ex: SVP.tar.gz, <dataset>_support.tar.gz, group files when appropriate)
water column sonar
level_00 (raw)
<dataset> (ex: cruise + instrument)
level_01 (processed)
<dataset> (ex: cruise + instrument + provider)
level_02 (products)
<dataset> (ex: cruise + instrument + provider)
trackline (includes single beam, magnetometer, side scan, sub-bottom, and backscatter)
level_00 (raw)
<dataset> (ex: cruise + trackline)
level_01 (processed)
<dataset> (ex: cruise + trackline + provider)
(nbp1508_trackoine_ldeo.tar.gz)
level_02 (products)
<dataset> (ex: cruise + trackline + provider)
multibeam
level_00 (raw)
<dataset> (ex: cruise + instrument)
level_01 (processed)
<dataset> (ex: cruise + instrument + provider)
level_02 (products)
<dataset> (ex: cruise + instrument + provider)

April 2024 30
1.6 Dataset (Data Theme) – Data Management Protocol
The following are required metadata fields specific to each data type that should be provided in
addition to the minimum requirements presented in Chapter 1.1 and Table 1.1.
1.6.1 Bathymetry Data Management
Single beam sonars ensonify the seafloor with a single narrow beam of sound typically directly
below the vessel, whereas multibeam sonars ensonify the seafloor with a wide swath of sound,
dividing the return from the seafloor into multiple beams across the wide swath. Multibeam
sonars cover the space directly under the ship and out to each side and collect two types of data:
seafloor depth and backscatter. The seafloor depth, or bathymetry, is computed by measuring
the time it takes for the sound to leave the array, reflect from the seafloor, and return to the
array. Multibeam and single beam bathymetry raw data (as collected) are recorded in the
instrument’s vendor-specific file format. Common file formats include, but are not limited to .all,
.kmall, .imb, .s7k, .xse, and .raw.
The following subchapters and Chapter 2 identify additional information specific to bathymetry
data that should be included in a survey report and/or the metadata record. NCEI is the preferred
destination for all bathymetric data and products to be included in the U.S. Bathymetry Gap
Analysis (NOAA IOCM, n.d.) and to be made publicly discoverable and accessible. We encourage
our partners, including those in government, industry, and academia, to collect/process
bathymetry data using SOMP guidelines and submit it to NCEI.
1.6.1.1 Minimum Requirements for Bathymetry Data Stewardship and Discovery
At minimum, bathymetry data must include:
• Raw and/or processed data files and/or products in vendor-specific format (e.g., .all,
.s7k, .xse). Processed data should be submitted in an open-source format such as .gsf
• Metadata should include all required fields (See Chapter 1.4 for details).
• Submissions should conform to NCEI guidance for archiving (See Chapter 1.6.2.2).
• Multibeam and single beam data submissions to the NCEI archive should be made by
emailing [email protected] to alert a data manager of incoming data, set up the data
submission, and/or ask any questions.
• When multibeam or single beam sonar data are to be submitted for archiving at NCEI,
data providers should work with NCEI data managers to determine the best method
for packaging data.
• One option to assist in data packaging is CruisePack (NOAA NCEI, n.d. c.), a standalone
executable, to package sonar and any ancillary data. CruisePack generates consistent
and complete metadata to document the data collection process and ensures that
data submitted to NCEI are in a standardized format for automated incorporation into
the archive.
• NCEI maintains raw multibeam (as collected) data files in the instrument’s vendor-
specific format (e.g., .all, .s7k, .xse). However, other supplemental data (sound speed

April 2024 31
profiles, tides, vessel offsets, cruise reports, etc.) and/or processed versions or
products of the multibeam data are also accepted.
• Processed multibeam data shall be delivered in an MB-System processed format or
another non-proprietary format. The majority of processed data in the multibeam
bathymetry database are in MB-System, XYZ, or Generic Sensor Format (GSF) format.
• NCEI prefers single beam data to be in M77T format. Other acceptable formats for
data or navigation products include GeoJSON, GeoCSV, or American Standard Code
for Information Interchange (ASCII) CSV/tab-Delimited (with format documentation).
• NCEI ingests raw single beam data but requires associated navigation data in order for
it to be discoverable via the Trackline Geophysical Data Viewer (NOAA NCEI, n.d. d.).
Navigation information must either (1) be provided in a separate folder under the
single beam folder structure, or (2) if multibeam bathymetry was collected during the
cruise, the navigation data from the multibeam database may be used. If no
navigation information is provided for raw single beam data, then the data will be
archived but will remain undiscoverable through NCEI data discovery portals and only
accessible upon request to [email protected].
• If data are intended to be regularly submitted to the NCEI archive in support of the
submission agreement.
• For more detailed information, see the document “Submitting Marine Geophysical
Data” (NOAA NGDC, n.d.).
1.6.2 Backscatter Data Management
Seafloor and lakebed backscatter are a measurement of the intensity of the sound echo
generated by SSS, SBES, and MBES transducers that reflect from the targeted area of the seafloor
or lakebed to the instrument’s receiver. This process is explained in detail in the Backscatter
Measurements by Seafloor-Mapping Sonar: Guidelines and Recommendations report (Lurton and
Lamarche, 2015), the definitive resource at this time for backscatter data acquisition and
processing practices, and in Chapter 3: Seafloor and Lakebed Backscatter. Use of backscatter data
in the water column is discussed in Chapter 4: Water Column Sonar.
Sonar instruments are typically used to acquire water depth measurements (i.e., bathymetry).
However, they can also be calibrated to operate at frequencies optimal for recording backscatter
or acoustic reflectivity data so that acoustic surveys can potentially yield information about
bottom topography and composition contemporaneously.
Raw backscatter data files are processed to yield image mosaics of backscatter intensity
indicating the seafloor or lakebed substrate’s composition and texture. These images can then
be interpreted and used to map aquatic geological and biological characteristics and habitats, as
well as cultural heritage sites (e.g., shipwrecks) and other anthropogenic features (e.g., debris,
disposal sites).
However, when raw backscatter (as collected) data files are recorded in the instrument
manufacturer’s proprietary file format, calibration settings may vary from survey to survey.

April 2024 32
Different software, settings, and methods are also used during image processing and mosaic
generation, resulting in non-standard data collection and product generation practices. Given the
variability in instruments, settings, and processing used in surveys and interpretation, Lurton and
Lamarche (2015) make the following overall recommendations for data preservation and
documentation:
• Data Format: preserve data in a “... format that allows [the user] to erase all previous
corrections and to revert to the raw unprocessed signal… All processing steps should
be described in this format.” (p. 73)
• Metadata Requirements: include settings and corrections applied to the raw data, the
backscatter data values assigned by the instrument manufacturer, and details of
processing steps used to derive products. (p. 73-74)
• Interoperability and re-use of data: develop “... a nomenclature of processing levels
of backscatter… [as] a means to better compare final processed products from various
origins.” (p. 172)
1.6.2.1 Minimum Requirements for Backscatter Data Stewardship and Discovery
At minimum, backscatter data must include:
• Raw and/or processed data files.
• Metadata (See Chapter 1.4 for details on required metadata fields).
1.6.2.2 Guidance for Archiving Backscatter Data with NCEI
• Backscatter data submissions to the NCEI archive should be made by emailing
[email protected] to alert a data manager of incoming data, set up the data
submission, and/or ask any questions.
• When backscatter data are to be submitted for archiving at NCEI, data providers
should work with NCEI data managers to determine the best method for packaging
data.
• One option to assist in data packaging is CruisePack (NOAA NCEI, n.d. c.), a standalone
executable, to package sonar and any ancillary data. CruisePack generates consistent
and complete metadata to document the data collection process and ensures that
data submitted to NCEI are in a standardized format for automated incorporation into
the archive.
• For more detailed information, see the document “Submitting Marine Geophysical
Data” (NOAA NGDC, n.d.).
1.6.3 Water Column Sonar Data Management
Water column sonar measures acoustic reflectance from scatterers in the ensonified volume,
typically using a single beam or multibeam configuration. These instruments are used routinely
to map fish schools and other mid-water marine organisms, assess biological abundance,
characterize habitat, and map underwater gas seeps.

April 2024 33
Most single-beam systems designed for fishery research are calibrated for target strength (TS)
with established calibration procedures. Multibeam systems run through a ‘normalization’
process that can improve water column data (but they rarely receive full TS calibrations). In either
case, the water column mapping range can extend from the transducer to the seafloor (if
downward-looking) or to the water surface (if upward-looking); the range can also be limited
within the water column by attenuation (related to operating parameters and water properties)
and other effects, such as interference and synchronization.
The water column sonar raw (as collected) data files are recorded in the instrument’s vendor-
specific format. Common and historic file formats for single beam and multibeam, stationary and
non-stationary water column sonar systems include, but are not limited to, .wcd, .raw., .ek5,
.imb, .s7k, .01A, and .kmwcd.
The following subchapters identify information specific to all water column sonar data types that
should be included in the metadata record.
1.6.3.1 Minimum Requirements for Water Column Sonar Data Stewardship and Discovery
• Ensure navigation datagrams are included in the water column sonar files; if vessel-
based.
• Ensure time-synced position information is included as a separate document, if
autonomous or not already embedded in the water column sonar files.
• Include absorption coefficients and other relevant calibration information (TS
calibrations performed before/after data acquisition, file applied during acquisition,
etc.).
• Other valuable data and metadata to include, if available:
o International Hydrographic Organization (IHO) sea area.
o Conductivity-temperature-depth (CTD) and underway Conductivity-
Temperature-Depth (uCTD) profiles.
o Sound speed profiles.
1.6.3.2 Guidance for Archiving Water Column Sonar Data with NCEI
• Water column sonar data submissions to the NCEI archive should be made by emailing
[email protected] to alert a data manager of incoming data, set up the data
submission, and/or ask any questions.
• Data providers must use CruisePack (NOAA NCEI, n.d. c.), a standalone executable to
package sonar and any ancillary data, when water column sonar data are submitted
to NCEI archiving. CruisePack generates consistent and complete metadata to
document the data collection process and ensures that data submitted to NCEI are in
a standardized format for automated incorporation into the archive. NCEI will mint a
digital object identifier for the sonar instrument on that cruise to provide a permanent
citation for the datasets and facilitate proper attribution to the original data provider.

April 2024 34
• To become a regular data provider to the NCEI archive in support of the NOMEC
agreement.
• For more detailed information, see the “Submitting Marine Geophysical Data”
document (NOAA NCEI. n.d. a.).
1.6.4 Side Scan Sonar Data Management
SSS collects a time series of backscatter, just like multibeam sonar does, except that there is no
angular discrimination to the backscatter time series. This instrument is used to map seafloor
geological and biological characteristics and habitats, as well as cultural heritage sites (e.g.,
shipwrecks) and other anthropogenic features (e.g., debris, disposal sites). SSS raw data (as
collected) files are recorded in the instrument’s vendor-specific format. Common file formats
include, but are not limited to .xtf, .jsf., .hsx, and .gcf.
The following subchapters identify additional information specific to SSS data to include in the
metadata record.
1.6.4.1 Minimum Requirements for Side Scan Sonar Data Stewardship and Discovery
At minimum, SSS data must include:
• Raw and/or processed data files in JSF, HSX, or open-source format.
• Required metadata (See Chapter 1.4 for details on required metadata fields).
1.6.4.2 Guidance for Archiving with NCEI
• SSS data submissions to the NCEI should be made by emailing
[email protected] to alert a data manager of incoming data, set up the data
submission, and/or ask any questions.
• When SSS data are to be submitted for archiving at NCEI, data providers will work with
NCEI Data Managers to determine the best method for packaging data.
• NCEI ingests SSS data but requires associated navigation in order for it to be
discoverable via the Trackline Geophysical Data Viewer (NOAA NCEI, n.d. d.).
Navigation information must either (1) be provided in a separate folder under the side
scan folder structure, or (2) if multibeam bathymetry was collected during the cruise,
the navigation data from the multibeam database may be used. If no navigation is
provided for SSS data, then the data will be archived but will remain undiscoverable
through NCEI data discovery portals and only accessible upon request to
• For more detailed information, see the document “Submitting Marine Geophysical
Data” (NOAA NGDC, n.d.).
1.6.4.3 Side Scan Sonar Data Formats
• The raw and processed side scan sonar data (i.e., mosaics) should be archived to
ensure data preservation to the fullest extent (i.e., no information is lost).
April 2024 35
• Storage of side scan sonar images and mosaics is preferred to allow for a more
thorough examination of data.
1.6.5 Sub-Bottom Data Management
The sub-bottom profiling (SBP) chapter of the SOMP describes the SOPs single channel [seismic]
acoustic systems operating within the 0.2 to 24 kHz frequency range. These systems image the
near-surface stratigraphy and seafloor morphology (<100 m) in marine, lacustrine, and fluvial
environments. Sub-bottom data are generally collected for shallow geologic assessments and
resource management.
Below are suggested SBP data management guidelines and specifications to be followed during
data collection, processing, and archiving to ensure the data are transferable and perpetually
accessible.
SBP raw data (as collected) are recorded in the instrument’s vendor-specific format. Common file
formats include .jsf, .keb, and .ses. The industry-standard for seismic data is the SEG-Y Data
Exchange format, an open standard maintained by the Society of Exploration Geophysicists (SEG).
The latest revision, SEG-Y 2.0 (Hagelund and Levin, 2017), was released in January 2017.
The following chapter identifies additional information specific to SBP data to be included in the
metadata record.
• Convert proprietary formats recorded during acquisition to SEG-Y for archiving.
Proprietary formats should be retained as well, assuming that these formats will not
be accessible into perpetuity. SEG-Y files should be archived uncompressed, as
compression algorithms may become unsupported over time.
• The 3200-byte textual file header should be encoded as EBCDIC or ASCII (UTF-8)
character code and retain as much information as possible. At minimum, it should
include SEG-Y revision level, date of acquisition, geographic location, line
identification, signal sweep information, and recording format.
• The 400-byte binary file header should retain as much information as possible
relevant to the SEG-Y file acquisition parameters; at minimum, it should include those
fields designated as mandatory in the SEG-Y rev. 2.0 standard. It is highly
recommended that additional information be retained, including sweep frequencies
(start and stop in hertz [Hz]), sweep length in milliseconds (ms), sample interval (ms),
and samples per trace to ensure adequate subsequent use of the data. If all traces in
a data file are of equal length, set the fixed-length flag in the binary header to improve
playback performance.
• The 240-byte trace header(s) should be populated using the SEG-Y standard. It is
highly recommended that the source coordinates for each trace be included in the
trace header, as well as recorded externally through the positioning device (e.g., GPS).
When archiving positioning data, such as including an explicitly defined coordinate
referencing system with the International Association of Oil and Gas Producers (IOGP)

April 2024 36
European Petroleum Survey Group (EPSG) Geodetic Parameter Dataset code (IOGP
Geomatics Committee, n.d.), practice extreme care.
• Archive SEG-Y data with (1) minimal post-acquisition processing applied and (2) fully
annotated data-file iterations with processing filters (e.g., automatic gain control
[AGC], bandpass, etc.).
• Collect SBP files using the acquisition system-provided formats, even if they are
proprietary file types.
• Record swept-frequency data in both envelope and analytic (also known as full
waveform) formats. Envelope data records are helpful in determining the “big
picture”, while full-waveform records are helpful in investigating finer details.
• Published SBP data should be archived and disseminated in SEG-Y format to facilitate
accessibility and usability by the widest audience of users.
1.6.5.1 Minimum Requirements for Sub-Bottom Data Stewardship and Discovery
At minimum, SBP data must include:
• Raw and/or processed data files in SEG-Y format.
• Required metadata (See Chapter 1.4 for details on required metadata fields).
1.6.5.2 Guidance for Archiving with NCEI
• SBP data submissions to the NCEI should be made by emailing
[email protected] to alert a data manager of incoming data, set up the data
submission, and/or ask any questions.
• When SBP data are to be submitted for archiving at NCEI, data providers should work
with NCEI Data Managers to determine the best method for packaging data.
• NCEI encourages data providers to submit SBP data in SEG-Y format as NCEI relies on
SEG-Y for extracting navigation necessary to generate track lines that display the
location of the data in the Trackline Geophysical Data Viewer (NOAA NCEI, n.d. d.).
• Data submitted in unsupported formats will still be accepted but will not be
discoverable through the web services provided at NCEI. These data are accessed
from the archive upon request to trackline.info@noaa.gov.
For more detailed information, see the document “Submitting Marine Geophysical Data”
(NOAA NGDC, n.d.).
1.6.6 Magnetometry Data Management
A magnetometer is a passive instrument that detects variations in the Earth's magnetic field. This
instrument has many applications, including structural geological mapping, energy and mineral
exploration, archaeology, and munitions detection. Magnetic raw data (as collected) are time-
series data. Common file formats include but are not limited to .csv and .txt. Present magnetic
data in a format that can be imported and viewed in a GIS platform.

April 2024 37
The following chapter identifies additional information specific to be included with
magnetometer data.
1.6.6.1 Magnetometer Protocol (Data Standard)
• For magnetometer time-series data to be useful and easily understood, consistency is
important. Using the column headers as described in Table 1.2 will aid data collectors
and users in ensuring the utility of data:
Table 1.2. Minimum magnetometer data file headers necessary for magnetometer data records.
Column Header
Example
Description
Latitude
42.123456
Towfish location when magnetic reading was recorded. Latitude
expressed to six decimal places. Locations in the Northern Hemisphere
expressed in positive numbers. ISO 6709
Longitude
-80.123456
Towfish location when magnetic reading was recorded. Longitude
expressed to six decimal places. Locations west of the prime meridian
expressed in negative numbers. ISO 6709
Date
2022-01-02
Date, in year-month-day, in UTC Time, when the magnetic reading was
recorded. ISO 8601
Time
09:13:23.05
Time, as hh:mm:ss.ss, in UTC, when the magnetic reading was
recorded. ISO 8601
Reading
420145.07
Raw magnetic reading for the magnetic sensor. Multiple sensors
should have separate columns for each sensor. Multi-sensor data
should indicate from which sensor the reading was derived.
Altitude/Depth
10.3/-20.5
Sensor altitude or depth in meters. If both values were recorded,
separate into two columns. If multiple sensor data were recorded,
include separate columns for each sensor.
Line
1
Survey dependent line name or number to denote all readings
recorded sequentially on a particular line.
• See Appendix B for detailed data standards and structure.
• For effective processing, it is critical to capture time and date for correlation of the
time-series data with other background field interference. Time and date should be
recorded in two separate fields and use only UTC/date, not local time/date (Appendix
A).
• Other metadata are especially useful in processing and interpreting magnetic data.
For example, in data collected by multiple instrument gradiometer arrays, noting
which instrument collected which sample will allow for refinement of an anomaly’s
location in geographic space: the instrument with the higher variance from the
background field was closer at that precise moment to the ferromagnetic material
causing the anomaly.
1.6.6.2 Minimum Requirements for Magnetometer Data Stewardship and Discovery
At minimum, magnetometer data must include:

April 2024 38
• Raw and/or processed data files.
• Required metadata (See Chapter 1.4 for details on required metadata fields).
• Submissions should conform to NCEI guidance for archiving (See Chapter 1.6.6.1).
• Magnetometer data submissions to the NCEI should be made by emailing
[email protected] to alert a data manager of incoming data, set up the data
submission, and/or ask any questions.
• When submitting magnetometer data for archive at NCEI, data providers should work
with NCEI Data Managers to determine the best method for packaging data.
• For more detailed information, see the document “Submitting Marine Geophysical
Data” (NOAA NGDC, n.d.).
1.7 References
ESIP. 12 September 2017. “MD Metadata.” http://wiki.esipfed.org/index.php/MD_Metadata
GO FAIR. n.d. “FAIR Principles.” www.go-fair.org/fair-principles/.
NOAA IOOS. n.d. “Access IOOS Data.” https://ioos.noaa.gov/data/access-ioos-data/
NOAA NCEI. n.d. a. “Contributing Geological and Geophysical Data.”
https://www.ncei.noaa.gov/products/contribute-marine-geological-geophysical-data
NOAA NCEI. n.d. b. “Metadata.” https://www.ncei.noaa.gov/resources/metadata.
NOAA NGDC. 9 January 2020. “MI Metadata.”
https://www.ngdc.noaa.gov/wiki/index.php/MI_Metadata.
NOAA NODC. January 2012. “Part 2: Extensions for Imagery and Gridded Data. Workbook.” ISO
19115-2 Geographic Information—Metadata.
https://www.ncei.noaa.gov/sites/default/files/2020-04/ISO%2019115-
2%20Workbook_Part%20II%20Extentions%20for%20imagery%20and%20Gridded%20Data
.pdf.
OAIS Reference Model. n.d. “Home.” http://www.oais.info/.
USGS. 21 June 2021. “Metadata Creation.” Data Management.
https://www.usgs.gov/products/data-and-tools/data-management/metadata-creation.
Bathymetry
IHO. September 2022. “S-44 Edition 6.1.0.” https://iho.int/uploads/user/pubs/standards/s-
44/S-44_Edition_6.1.0.pdf.
NOAA. 2024. Hydrographic Surveys Specifications and Deliverables.
https://nauticalcharts.noaa.gov/publications/documents/HSSD_2024-1-01.pdf.
NOAA IOCM. n.d. “U.S. Bathymetry Coverage and Gap Analysis.”
https://iocm.noaa.gov/seabed-2030-bathymetry.html.
NOAA NCEI. n.d. c. “CruisePack.” https://www.ncei.noaa.gov/products/cruisepack.
NOAA NCEI. n.d. d. “Trackline Geophysical Data.”
https://www.ncei.noaa.gov/maps/geophysics/.

April 2024 39
NOAA NGDC. n.d. “Submitting Marine Geophysical Data to the NOAA National Centers for
Environmental Information & the Co-Located IHO Data Center for Digital Bathymetry.”
https://www.ngdc.noaa.gov/iho/SubmittingMarineGeophysicalData.pdf.
Backscatter
LaFrance Bartley, M., T. Curdts, and S. Stevens. 2019. Procedures and Criteria for Evaluating
Benthic Mapping Data: A Northeast Coastal and Barrier Network Methods Document.
Natural Resource Report NPS/NCBN/NRR—2019/2050. National Park Service, Fort Collins,
Colorado. https://irma.nps.gov/DataStore/DownloadFile/633175.
Lurton, X., Lamarche, G. 2015. Backscatter measurements by seafloor‐mapping sonars.
Guidelines and Recommendations. https://geohab.org/wp-
content/uploads/2018/09/BWSG-REPORT-MAY2015.pdf.
NOAA NCEI. n.d. c. “CruisePack.” https://www.ncei.noaa.gov/products/cruisepack.
NOAA NGDC. n.d. “Submitting Marine Geophysical Data to the NOAA National Centers for
Environmental Information & the Co-Located IHO Data Center for Digital Bathymetry.”
https://www.ngdc.noaa.gov/iho/SubmittingMarineGeophysicalData.pdf.
Water Column Sonar
Demer, D.A., Berger, L., Bernasconi, M., Bethke, E., Boswell, K., Chu, D., Domokos, R., et al.
2015. “Calibration of acoustic instruments.” ICES Cooperative Research Report No. 326.
http://dx.doi.org/10.25607/OBP-185.
ICES. 2016. “A metadata convention for processed acoustic data from active acoustic systems.”
Series of ICES Survey Protocols SISP 4-TG-AcMeta. https://doi.org/10.17895/ices.pub.7434.
NOAA NCEI. n.d. a. “Contributing Geological and Geophysical Data.”
https://www.ncei.noaa.gov/products/contribute-marine-geological-geophysical-data.
NOAA NCEI. n.d. c. “CruisePack.” https://www.ncei.noaa.gov/products/cruisepack.
Side Scan Sonar
LaFrance Bartley, M., T. Curdts, and S. Stevens. 2019. Procedures and Criteria for Evaluating
Benthic Mapping Data: A Northeast Coastal and Barrier Network Methods Document.
Natural Resource Report NPS/NCBN/NRR—2019/2050. National Park Service, Fort Collins,
Colorado. https://irma.nps.gov/DataStore/DownloadFile/633175.
Lurton, X., Lamarche, G. 2015. Backscatter measurements by seafloor‐mapping sonars.
Guidelines and Recommendations. https://geohab.org/wp-
content/uploads/2018/09/BWSG-REPORT-MAY2015.pdf.
NOAA NCEI. n.d. d. “Trackline Geophysical Data.”
https://www.ncei.noaa.gov/maps/geophysics/.
NOAA NGDC. n.d. “Submitting Marine Geophysical Data to the NOAA National Centers for
Environmental Information & the Co-Located IHO Data Center for Digital Bathymetry.”
https://www.ngdc.noaa.gov/iho/SubmittingMarineGeophysicalData.pdf.

April 2024 40
Sub-bottom
Hagelund, R., and Levin, S. (2017). SEG-Y_r2.0: SEG-Y Revision 2.0 Data Exchange Format. SEG
Technical Standards Committee.
https://seg.org/Portals/0/SEG/News%20and%20Resources/Technical%20Standards/seg_y
_rev2_0-mar2017.pdf.
IOGP Geomatics Committee. n.d. “About the EPSG Dataset.” EPSG Dataset: v10.081.
https://epsg.org/home.html.
NOAA NCEI. n.d. d. “Trackline Geophysical Data.”
https://www.ncei.noaa.gov/maps/geophysics/.
NOAA NGDC. n.d. “Submitting Marine Geophysical Data to the NOAA National Centers for
Environmental Information & the Co-Located IHO Data Center for Digital Bathymetry.”
https://www.ngdc.noaa.gov/iho/SubmittingMarineGeophysicalData.pdf.
Magnetometer
Amasci Creative Limited. n.d. "Geophysical Metadata Log Template." Geomatrix Earth Science
Limited. www.geomatrix.co.uk/tools/geophysical-metadata-log-template/.
BOEM. 27 May 2020. Guidelines for Providing Archaeological and Historic Property Information:
Pursuant to 30 CFR Part 585.
https://www.boem.gov/sites/default/files/documents/about-
boem/Archaeology%20and%20Historic%20Property%20Guidelines.pdf.
INCITS. No date. “Geographic Information - Temporal Schema.”
https://webstore.ansi.org/Standards/INCITS/INCITSISO191082002R2013.
INCITS. No date. “Geographic Information - Observations And Measurements.”
https://webstore.ansi.org/Standards/INCITS/INCITSISO1915620112012.
NOAA NGDC. n.d. “Submitting Marine Geophysical Data to the NOAA National Centers for
Environmental Information & the Co-Located IHO Data Center for Digital Bathymetry.”
https://www.ngdc.noaa.gov/iho/SubmittingMarineGeophysicalData.pdf.
Ponce, D.A., Denton, K.M., and J.T. Watt. 2016. Marine magnetic survey and onshore gravity
and magnetic survey, San Pablo Bay, northern California. U.S. Geological Survey Open-File
Report. http://dx.doi.org/10.3133/ofr20161150.
Reay, S., D.C. Herzog, S. Alex, E.P. Kharin, S. McLean, M. Nosé, and N.A. Sergeyeva. 2010.
“Magnetic Observatory Data and Metadata: Types and Availability.” In Geomagnetic
Observations and Models, edited by M. Mandea and M. Korte. IAGA Special Sopron Book
Series, vol 5. Dordrecht: Springer. https://link.springer.com/chapter/10.1007/978-90-481-
9858-0_7.
U.S. Department of the Navy. n.d. “Naval History and Heritage Command Methods and
Guidelines for Conducting Underwater Archaeological Fieldwork.”
https://www.history.navy.mil/research/underwater-archaeology/sites-and-
projects/Guidelines.html.
U.S. Geological Service. 2010. “Open-File Report 2009-1100, Version 1.1: Metadata.”
pubs.usgs.gov/of/2009/1100/metadata.html.
April 2024 41
1.8 Additional Resources
Mareano. No date. “Specifications for Seabed Mapping within the MAREANO programme.”
https://mareano.no/resources/files/om_mareano/arbeidsmater/standarder/Appendix-B-
Technical-Specifications-1.pdf.
Open Navigation Surface Working Group. 2006. “Description of Bathymetric Attributed Grid
Object (BAG).” https://www.ngdc.noaa.gov/mgg/bathymetry/noshdb/ons_fsd.pdf.
April 2024 42
Chapter 2: Bathymetry
Peg Brady, NOAA
Bill Danforth, USGS
Jeff Danielson, USGS
Wayne Estabrooks, U.S. Navy
Xan Fredericks, USGS
Martha Herzog, NOAA
Monique LaFrance-Bartley, NPS
James J. Miller, NOAA
Jake Fredericks, USGS
Eric Moore, USGS
Lora Turner, BOEM
Paul Turner, NOAA
Matthew Wilson, NOAA
Jennifer Wozencraft, USACE
2.1 Introduction
The SOMP bathymetry guidelines aim to provide a standard set of requirements to ensure that
all seafloor mapping efforts advance the National Strategy to Map, Explore, and Characterize the
U.S. EEZ (NOMEC, 2020). This chapter provides overarching guidance and recommendations for
collecting, processing, and delivering bathymetric data acquired by multibeam, single beam,
phase-discriminating sonar, and lidar systems. It summarizes best practices for reporting
positioning, system calibration and QA/QC techniques, coverage and resolution, uncertainty,
tides and water levels, and general gridded data specifications. Various references were
consulted for source material, including IHO S-44 (2022), the NOAA Office of Exploration and
Research (OER) Deepwater Exploration Mapping Procedures Manual (NOAA OE, 2020), the NOAA
Office of Coast Survey (OCS) Specifications and Deliverables (NOAA OCS, 2024), Australian
Multibeam Guidelines (Picard et al., 2018), and Norwegian Mapping Authority Hydrographic
Service (NMAHS) (MAREANO Programme, 2017). This chapter does not address manufacturer-
specific recommendations or recommendations about specific use cases.
2.2 Overview
Bathymetry is the measurement of water depths and is considered the underwater version of
topography. Bathymetric maps are the fundamental first step in ocean mapping, exploration, and
characterization operations. The applications of bathymetry are vast and include the study of
underwater hazards like landslides and faults as well as important seafloor habitats like steep-
sided trenches, canyons and seamounts, and channels cutting through abyssal plains. Bathymetry
data are the backbone of nautical charts at all depths for the safety of surface navigation and
subsurface vessels. It also plays essential roles in the delineation of international maritime
boundaries, management of sediments for navigation, flood risk management, environmental
stewardship, identification of offshore resources such as gas and oil reserves, tsunami inundation
and storm surge modeling, and the safe planning and maintenance of submarine communication
cables that transmit the vast majority of information around the globe.

April 2024 43
Bathymetry data are collected using multibeam, single beam, split-beam, interferometric sonars,
and lidar systems. Different frequencies of bathymetric systems are optimal for different depths:
• Lower-frequency systems (~12 kHz) achieve efficient mapping coverage at full ocean
depths, including the deepest parts of the ocean trenches;
• Mid-range frequency systems (~30 kHz) efficiently target water depths from 200–
6000 m;
• High-frequency systems (~100–700 kHz) are most useful for depths less than 200 m;
and
• Lidar is appropriate for relatively clear, shallow water with systems selected based on
depth requirements (as deep as 80 m).
For this chapter, technical terms will follow the definitions in the IHO Hydrographic Dictionary
(Hydrographic Dictionary Working Group, 2019).
2.3 Bathymetric Data Sources
The IHO Hydrographic Dictionary (document S-32) provides an authoritative definition for the
following bathymetric data sources covered in the Bathymetry Chapter of the SOMP: SBES, MBES,
Interferometric Sonar, and lidar.
Figure 2.1. SOMP bathymetry guidelines chart: bathymetry guidelines cover elevation, seafloor
characterization, habitat characterization, nautical charts, and other topics.
April 2024 44
2.3.1 Single Beam Echosounder (SBES)
SBESs transmit and receive a sound pulse within a single, narrow, and (generally) downward-
looking field of view to provide one bottom detection per ping cycle.
The types of SBES used vary across Federal agencies. Most mapping and surveying grade systems
are dual-frequency, using both a high and a low frequency with beamwidths between 3–8
degrees for high frequency and 20–30 degrees for low frequency. Provided the magnitude of
vessel roll and pitch is less than half of the sonar beamwidth, and the total heave is less than 0.5
m, these attitude characteristics will have little effect on sounding accuracy. If the system is not
equipped with an attitude sensor to correct data for vessel motion, SBES should not be used
when vessel roll and pitch angles exceed sonar beam width or total heave exceeds 0.5 m.
Most SBES systems output calculated depth values rather than the two-way travel time of each
sonar ping, which requires configuration with a value for the speed of sound through the water
column. It is recommended that field units configure SBES systems using a standard estimate for
their given operating area, which must be preserved in the vessel configuration file of the
metadata (e.g., 1500 m/s for the speed of sound in seawater). SBES data should then be corrected
using full sound speed profiles acquired during the survey in post-processing.
2.3.2 Multibeam Echosounder (MBES)
MBES is a swath-sounding system in which the equipment emits a timed pulse of sound that is
narrow in the fore-aft direction and wide in the across-track direction. The reflected sound is
detected by several receivers arranged as an array; signal processing algorithms are used for
subsequent beamforming.
For each received beam, the time interval between transmission and reception of the reflected
sound is converted into a range using a measured or predicted sound speed profile. System
geometry, navigation, attitude data, and corrections for sound refraction are then used to
convert each range and received beam angle into positions and depths on the seafloor.
2.3.3 Interferometric Sonar
Interferometric sonar is a swath-sounding system in which the equipment emits a timed pulse of
sound that is narrow in the fore-aft direction and wide in the across-track direction, typically with
one beam projected to each side of the sonar. The system rapidly samples the reflected sound
following each emission. For each sample, the phase difference of the reflected sound arriving at
two (or more) receivers located a known distance apart is measured and used to compute the
acoustic angle of arrival. Also, the time difference between the emission and reception for each
sample is converted to a range using a measured or predicted sound speed profile. System
geometry, navigation, attitude data, and corrections for sound refraction are then used to
convert each range and angle pair to positions and depths on the seafloor.

April 2024 45
2.3.4 Lidar
Airborne lidar bathymetry is a technique for measuring the depths of moderately clear,
nearshore coastal waters, lakes, and rivers from a low-altitude aircraft using a scanning, pulsed
laser beam. The round-trip time-of-flight of each laser pulse to the water surface and seafloor is
measured by receivers in the aircraft. With this information and the speed of light in air and
water, accurate water depth can be calculated (Irish and Lillycrop, 1999). Topo-bathy lidar
systems are airborne lidar bathymeters that seamlessly collect land elevation data near the
shore, across the land-water interface, and into the water as deep as 80 m. The primary
limitations on depth performance are airborne lidar system specifications and water clarity.
Breaking waves that create white water and entrain sediment in the water column, turbidity
plumes, kelp, and dark substrate may inhibit continuous data coverage.
2.4 General Protocols
2.4.1 Data Management
Management of bathymetric data is necessary for efficient use, future access, and validation of
analytical and interpretative results. Raw and processed data should be archived to ensure data
are preserved to the fullest extent.
See Chapter 1.6.1 for minimum bathymetric data requirements and management (e.g.,
recommended file formats, metadata, data archiving).
2.4.1.1 Raw Data Acquisition
The following information should be associated with raw data (as collected):
• Sonar settings:
o Operational frequency (report both frequencies if dual-frequency system)
o Ping rate
o Swath range
o Gains or corrections (e.g., time varied gain [TVG])
• Attitude and positioning:
o Specifications of the navigation system(s)
o Accuracy
• Spatial reference of raw data (and navigation system, if different):
o Coordinate system and horizontal datum
2.4.2 Sensor Installation Surveys
Surveying and documenting the alignment of mapping sensors is fundamental for establishing
and maintaining high data quality. Sonar and lidar installations must be surveyed to establish the
linear and angular offsets between sonar arrays or lidar sensor reference points, GPS/GNSS
antennas, and motion sensors within a uniform mapping reference frame (typically oriented with
April 2024 46
the vessel, vehicle, or sensor platform). Such surveys are conducted initially during the
installation process and when any of the equipment has changed or is suspected of having
changed (e.g., after dry dock or removal for factory calibration). It is crucial that sensor
installation surveys are conducted with a high degree of precision and accuracy and are reported
in a clear and standardized way that directly supports correct sensor configuration. The
Multibeam Advisory Committee (MAC) Recommendations provide best practices for Reporting
Vessel Geometry and MBES System Offsets in a template (MAC, 2021).
At a minimum, vessel configuration and offset information should be presented as a text file (e.g.,
ASCII) or spreadsheet (e.g., .csv, .xlsx) AND a schematic file (e.g., .jpg, .bmp., .tiff). The files should
contain details of survey vessel dimensions (length, width, draft) and offsets of survey
instruments. Provide multiple files if using more than one vessel or configuration.
2.4.3 Positioning
Positioning is the fundamental framework and starting point for every mapping operation. The
position of any point is referenced using either geodetic coordinates defined by latitude,
longitude, and ellipsoid height or Cartesian coordinates (x, y, z). The coordinate system should
be specified in metadata and documentation describing the survey.
Positions should reference a geodetic reference frame, which can be either a global (e.g.,
International Terrestrial Reference System [ITRS], WGS84) or a regional (e.g., ETRS89, NAD83)
reference system.
Coordinates calculated through GNSS and the GPS contain inherent errors from signal
transmission delays due to the atmosphere and must be corrected during bathymetric surveys
by applying differential GPS (DGPS) correctors. Several manufacturers provide these data via
subscription to DGPS receivers used in the offshore environment. Once the corrections are
applied, inherent errors should be reduced to the sub-decimeter level.
The navigation system should continuously determine the position of the survey vessel.
Uncertainty of the navigation system and QC methods should conform to the requirements
defined by the IHO (IHO, 2022). Position fixes should be digitally logged continuously along the
vessel track. Geodesy information should be present and consistent.
2.4.3.1 Geodetic Control
Horizontal control generally refers to the terrestrial network of geodetic marks that support two-
dimensional mapping positioning and how field units position mapping data relative to a datum.
Vertical control activities are conducted to support water level gauge installations, water level
measurements, Ellipsoidally Referenced Survey (ERS), and vertical accuracy validation.
Positions should reference a geodetic reference frame, either global (e.g., ITRS, WGS84) or
regional (e.g., ETRS89, NAD83). With frequent updates to geodetic reference systems, the epoch
for surveys with low positioning uncertainty should be recorded. If horizontal positions reference
a local horizontal datum, the name and epoch of the datum should be specified and tied to a
realization of the ITRS or equivalent global geodetic reference frame (e.g., ITRS, WGS84, ETRS89,

April 2024 47
NAD83 realizations). The transformations between reference frames/epochs, especially for
surveys with low uncertainty, should be considered.
2.4.3.2 Ellipsoidally Referenced Survey (ERS) Control
ERS is possible through GNSS-based sub-decimeter vertical control using a method of integer
ambiguity resolution-enabled carrier-phase kinematic positioning. Differential and related
carrier-phase methods based upon precise point positioning (PPP) kinematic GNSS methods are
permitted from a real-time kinematic (RTK) service or via post-processing. Post-processed
vertical control has the advantage of enhanced QC: quasi-independent forward- and reverse-
time processing reduces the uncertainty in the vessel height solution otherwise present in RTK-
based (forward-only) positioning.
The use of GPS over other GNSS (e.g., GLONASS) is preferred; however, if the availability of five
or more GPS satellites is infrequent in a particular survey environment, a hybrid GPS-GNSS
solution may be used. Inertially-aided systems help to ensure success in ERS regardless of the
GNSS technique utilized; tightly-coupled inertial-aided GNSS is vital to overcome positioning
problems associated with intermittent loss of individual satellite signals.
2.4.3.3 Tools
Software tools like Vertical Datum Transformation (VDatum; under development by NOAA’s
National Ocean Service [NOS]) convert elevation data from various sources into a standard
reference system.
A standard reference system is vital because irregularities can occur when data products are
created from different data sources. The capability of programs such as VDatum to transform
and fuse various elevation data benefits coastal applications, including inundation modeling (e.g.,
storm surge, tsunami, sea level rise impacts), ecosystem management and coastal planning,
hydrographic surveying, and ocean mapping using Kinematic GPS for vertical referencing, and
shoreline delineation from lidar data.
VDatum coverage is accessible to the public and complete in all coastal regions of the continental
United States (including the Great Lakes), Puerto Rico, and the U.S. Virgin Islands. In 2019 a
Southeast Alaska regional model was added, and coverage will be developed for Hawaii, Alaska,
and the Pacific U.S. territories once foundational geodetic and tidal data are established to allow
for valid model construction.
In addition, current models are being revisited to include additional foundational geodetic and
tidal data that will assist in improving transformational components of the VDatum models, assist
refining and validating the uncertainty associated with models, and support a broader range of
applications. The goal is to develop a VDatum utility throughout the country that will foster more
effective sharing of elevation data and, eventually, link such data through national databases.
VDatum is available online (NOAA, n.d. a.) as an application programming interface (API) (NOAA,
n.d. b.) and as downloadable software (NOAA, n.d. c.).

April 2024 48
2.4.5 Resolution and Coverage Types
The following coverage and resolution recommendations are not intended to interfere with or
supersede mission-specific requirements.
Bathymetric coverage is the mapped spatial extent of depth measurement based on the
combination of the survey pattern and the area of detection of the bathymetric data source.
The NOMEC Council recognizes the IHO as a leading industry source and authoritative subject
matter expert for bathymetry (IHO, 2022). The IHO is an intergovernmental organization that
works to ensure all the world’s seas, oceans, and navigable waters are surveyed and charted. The
IHO coordinates national hydrographic offices’ activities and sets standards to promote
uniformity in nautical charts and documents. It issues survey best practices and provides
guidelines to maximize the use of hydrographic information.
The SOMP identifies the IHO Standards for Hydrographic Surveys, S-44 6
th
Edition as the leading
source of standards and recommendations for hydrographic surveying and ocean mapping
bathymetric data standards. This publication specifies minimum standards according to the
intended use and encourages the use of IHO S-44 for purposes beyond the safety of navigation.
It introduces the concept of a Specification Matrix in Chapter 7.5 of parameters and data types
designed to cater to a range of needs (IHO, 2022).
Minimum bathymetry standards and feature detection requirements are defined in IHO S-44
Table 1 (IHO, 2022).
IHO S-44’s Specification Matrix Chapter 7.6 provides a range of selectable criteria for bathymetric
parameters and other data types collected (IHO, 2022). It allows flexibility and accommodation
of new and emerging technologies and inclusion of hydrographic surveys conducted for purposes
other than safety of navigation.
The following bathymetric data coverage types are recommended as minimum coverage
standards: Complete or 100% Coverage, Set Line Spacing, and Trackline (transit and
reconnaissance).
2.4.5.1 Complete or 100% Coverage
Complete or 100% Coverage: 100% bathymetric coverage implies that depth measurements are
mapped to the horizontal and vertical standards specified in IHO S-44 Table 1, such that they
provide a depiction of the vast majority of the bottom and can be considered as “full”
bathymetric coverage (IHO, 2022).
Bathymetric coverage of less than 100% should follow a systematic survey pattern to maximize
even distribution across the survey area. Additionally, the nature of the bottom (e.g., roughness,
type) and the requirements for safety of surface navigation in the area must be taken into
account early and often to determine whether bathymetric coverage should increase to meet
the Complete Coverage requirements in the area.
April 2024 49
2.4.5.2 Set Line Spacing
Set Line Spacing is recommended when acquiring bathymetric data in areas too shallow for
efficient full-bottom coverage bathymetry and can be accomplished with single beam,
multibeam, or lidar.
Nearshore environments are inherently dangerous, and the safety of personnel and equipment
shall always be the primary objective and consideration when conducting shallow water
operations. Field operations should not be attempted unless conditions are favorable.
2.4.5.3 Trackline Data Coverage/Transit Data
While the vessel is transiting, sonar data, including multibeam data, should be collected to
maximize total geographic coverage and contribute to the goals of the NOMEC Strategy. The
sonar data collection principles described in this chapter should be utilized during transit data
collection.
When real time sound speed data collection is not possible, Sound Speed Manager, (freeware
created and maintained by NOAA and the University of New Hampshire Center for Coastal and
Ocean Mapping/Joint Hydrographic Center) can be used to extract sound speed profiles from the
World Ocean Atlas (and other sources), and send them automatically to the multibeam
acquisition system to provide an approximate reference.
2.4.5.4 Crosslines
Crosslines are used to confirm internal consistency between survey lines and should be run
orthogonally to the main scheme lines of a survey. Where practicable, conduct a crossline in each
focused survey area; however, this may not be possible depending on the overall cruise or survey
goals. At a minimum, one crossline per cruise should be conducted and should cross roughly the
full range of depths found in the focus survey areas. If possible, the cross line should be run early
in the survey to identify (and resolve) potential problems sooner rather than later. For lidar, fly
crosslines for flight blocks that take longer than a day. Many software packages that process
bathymetric data offer a crossline analysis tool and report sounding comparisons to the 95%
confidence level for each IHO order specification.
2.4.5.5 Tides and Water Levels
Current and tidal information is essential for planning and performing coastal mapping
operations where tidal levels may be tightly linked to positioning and the mapping system data
quality. However, observing current and tidal levels is considered an integral part of coastal
mapping operations when conducting bathymetric data acquisition operations in waters
shallower than 200 meters or as specified as a project requirement.
For deeper water surveys (>200 m), the tidal range is generally a small percentage of water depth;
it is therefore considered negligible and the application of tidal correctors is optional. Document
the application or non-application of tides in the survey/dataset documentation with the vertical
datum specified as Mean Sea Level (MSL).

April 2024 50
Tidal data may be required for analysis for the future prediction of tidal heights and the
production of Tide Tables, in which case observations should cover as long a period as possible
and preferably not less than 30 days. Whenever surveyed/predicted tides or water levels are
used to reduce soundings to a datum, TVU calculations should incorporate the uncertainty of
these time series. In most circumstances, observed values are preferred over predicted.
If wave or water clarity conditions prohibit seamless data collection across the land/water
interface, collect topo-bathy lidar near low tide. Water clarity and wave conditions may change
with tide level, so data may be collected at both high and low tide to achieve seamless data across
the land/water interface.
Detailed guidance and recommendations for time series water level data and associated water
level reducers that can be applied to bathymetric soundings for correction to chart datum can be
found in the following reference documents: NOAA Hydrographic Survey Specifications and
Deliverables (NOAA OCS, 2022); NOAA Field Procedures Manual (NOAA OCS, 2021); International
Hydrographic Organization (IHO S-44 Edition 6.1.0).
2.4.5.6 Uncertainty Standards
Precise and accurate measurements are fundamental for quality bathymetric data.
Synchronization of multiple sensors with the sonar system is essential for meaningful spatial data
analysis. All measurements, however careful and scientific, are subject to some uncertainties.
Uncertainty analysis of the survey systems and data must be conducted to meet accuracy and
resolution standards and requirements. Position uncertainties must be expressed at the 95%
confidence level and should be recorded together with the survey data.
The capability of the mapping system should be demonstrated by a total propagated uncertainty
(TPU) calculation which may be separated into total horizontal uncertainty (THU) and total
vertical uncertainty (TVU) components.
The SOMP recommendations for Uncertainty Standards are based on the IHO Standards for
Hydrographic Surveys as outlined in Special Publication 44 (S-44), 6
th
Edition, which provides
suggested minimum standards to follow. Uncertainty standards and methods should conform to
the requirements as defined by the IHO (IHO, 2022).
2.5 Multibeam Protocols
2.5.1 System Geometry Review
Periodic reviews of the vessel/vehicle’s sensor offset survey against the navigation/attitude and
multibeam sensor configurations will ensure that all fields are interpreted correctly. Periodic
review will catch unintended modifications introduced, for example, during software upgrades
or by new users who may change installation parameters. If changes are found, assess recent
data (since the last system geometry review) to identify when and why the change was made and
determine whether data collected with the changed parameters need to be flagged or modified

April 2024 51
for downstream users. For example, incorrectly interpreted or modified waterline configuration
leads to a bulk offset in bathymetry that must be documented (and corrected prior to further
data collection).
2.5.2 Multibeam System Calibrations and Health Checks
To maintain maximum productivity and accuracy of data, the following system calibrations and
health checks are recommended.
2.5.2.1 Inertial Motion Sensor Calibration
Following the manufacturer’s service schedule is best practice to maintain up-to-date factory
calibrations for the inertial motion sensor. For inertial motion systems providing GNSS-aided
heading, an antenna baseline calibration should be conducted at least once annually, following
any significant repair periods, or if a heading misalignment is suspected. Note any such
calibrations in all documentation or metadata associated with the bathymetric dataset.
2.5.2.2 Multibeam Calibration Patch Test
Conduct a patch test at least once a year to resolve any angular misalignments of the multibeam
or ancillary equipment (e.g., transducers, inertial motion sensor, antennas) or if any equipment
is changed or disturbed. The patch test determines if there are any residual biases or errors in
navigation timing, pitch, roll, and heading/yaw and resolves each bias individually in that order.
The results of each test should be applied in the sonar acquisition software before data collection
for the following test and should be documented in metadata.
Apply the results of the geometric calibration to the motion sensor installation angles configured
in the data acquisition software. This approach is recommended for several reasons:
• The motion sensor typically has greater installation angle uncertainty than the
transmit antenna (TX) and receive antenna (RX) arrays due to the relatively short
baselines on the housing.
• The TX and RX array installation angle uncertainties are typically very low owing to the
leveling processes carried out during installation and the long survey baselines (in the
case of low-frequency, hull-mounted arrays).
• And perhaps most importantly, small installation biases cannot be determined
independently for the TX or RX arrays from the calibration data.
While the motion sensor software is configured with motion sensor installation angles directly
from the vessel survey, the multibeam calibration results are applied to the motion sensor
installation angles within the multibeam acquisition software because they reflect the combined
impact of these biases only on the multibeam data and not other sensors on board.
If calibration results indicate a residual bias greater than 0.1 degree, conduct another calibration
to verify the new angular offset values. Conduct the second calibration with the initial results
applied in the acquisition software, using an iterative process to fine-tune and verify the
installation angles. The accuracy of the results depends on the bathymetric features of the

April 2024 52
calibration area and the oceanographic conditions. Therefore, it is best to choose calibration
areas where sound speed conditions are relatively stable, and sea states are mild throughout the
tests. Although unlikely, if a new inertial motion system calibration (e.g., factory inertial
measurement unit (IMU) calibration or antenna baseline calibration) during the field season
results in new offsets, then it is recommended that a new patch test also be conducted to account
for the new motion sensor configuration and performance.
If the angular offsets are applied in the multibeam acquisition software and accounted for during
data acquisition, do not reapply them later in multibeam cleaning/processing software.
Any defined feature can be used for a patch test; a well-defined slope at approximately 10 to 20%
or more grade will provide the best results. Wrecks can be used; however, it is recommended
that the wreck be well defined to remove any ambiguity when processing the calibration data.
Features in debris fields or other cluttered areas should be avoided because of likely ambiguity.
Navigation timing error and pitch tests can cover a wide range of depths, as long as swath
coverage extends to at least ~45 degrees in the direction of overlapping coverage (the ‘corridor’
for assessing the alignment of soundings). Run the lines at different speeds, varying up to 5 knots,
to delineate the along-track profiles when assessing time delay. Navigation timing error bias
could also be determined from running lines over a distinct feature (i.e., shoal) on the bottom,
as long as the feature is ensonified by the vertical (nadir) beam.
Conduct roll tests in depths where the multibeam can achieve full angular swath width (i.e.,
before ‘roll-off’ of the coverage-versus-depth curve) to accentuate the outer swath differences
resulting from roll biases.
Determine heading (yaw) bias from two or more adjacent pairs of reciprocal survey lines, made
on each side of a submerged object or feature (i.e., shoal), in relatively shallow water. Avoid
features with sharp edges. Overlap adjacent swaths by 10–20% while covering the shoal and run
lines at a speed to ensure significant forward overlap.
Conduct system accuracy testing in an area similar in bottom profile and composition to the
survey area and during relatively calm seas to limit excessive motion and ensure suitable bottom
detection.
Example patch test procedure for each line set is shown in Figures 2.2, 2.3, and 2.4.

April 2024 53
Figure 2.2. Pitch: run one line twice in opposite directions at the same speed over a steep, well-defined
slope. Compare the nadir profiles of the swaths.
Figure 2.3. Heading/yaw: run two offset lines in the same direction and speed over a steep, well-defined
slope, with the outer third of the two swaths overlapping. Compare the along-track profile midway
between the two lines.

April 2024 54
The order in which these biases are determined may affect the accurate calibration of the
multibeam system. Conduct the calibration tests in the following order with the hydrographer
Figure 2.4. Roll: run the same line twice in opposite directions at the same speed over a flat seafloor area.
Compare the across-track profiles of the swaths.
Figure 2.5. Sample patch test line plan: note the definition of slope for all biases except roll, which is
on a flat area. Image source: Paul Johnson, NSF-funded Multibeam Advisory Committee (National
Science Foundation).
April 2024 55
determining the biases in the following order: navigation timing error, pitch, roll, and heading
(yaw).
There are several methods of achieving corrector values. One method is utilizing software that
determines the values automatically (e.g., using cleaned data to provide offsets that minimize
root mean square [RMS] errors between test lines). Another method is to have three or more
observers generate individual sets of values and use quantitative methods to develop a mean
value for each corrector. Ideally, the final offsets are based on the agreement between automatic
patch test tools and manual assessments by multiple observers. This process may be iterative,
applying preliminary results and refining each test in the post-processing software until no
further changes are warranted. Confirm offsets larger than 0.1 degrees with additional data
collection (with preliminary results applied).
Final values derived from the patch test should be entered into the acquisition software and
confirmed (without duplicating) in the processing suite.
2.5.2.3 Relative Backscatter Calibration
Use a relative backscatter calibration method to ensure consistency of the backscatter of a single
system with different settings (Lurton et al., 2015). This method involves collecting multibeam
data in a relatively flat, hard, and homogeneous seafloor region in a specific pattern consisting of
reciprocal lines with various settings for pulse length and power applied. The results are then
processed and can be applied during data collection or post-processing, depending on the
particular multibeam system.
This procedure helps to normalize differences in backscatter values resulting from variable
frequencies and pulse durations employed within sectors and among ping modes used during
multibeam data acquisition. A successful relative backscatter calibration helps to produce a
visually appealing backscatter mosaic image that displays the relative changes in backscatter that
are representative of changes in the seafloor properties rather than changes in echosounder
modes and transmit parameters.
2.5.2.4 Sound Speed Sensor Calibration
Sensors that determine sound speed should be calibrated according to the manufacturer’s
recommendation (typically annually). Calibration documentation provided by the manufacturer
should accompany these data in the NOAA archive and any survey reports.
2.5.2.5 Multibeam Speed Noise Testing
Significant limitations on multibeam performance can stem from elevated noise levels due to hull
design, engines, and other machinery; sea state; biofouling; electrical interference, etc.
Periodically, a series of tests should be run to track RX noise and RX spectrum to characterize the
vessel’s platform noise environment over a range of speeds or operating parameters (e.g.,
different engine lineups, if more than one is used during mapping operations).
Conduct these tests in calm to mild sea states, with low currents, and in the absence of rain and
high winds to isolate the impacts of elevated sea states and weather on noise levels (which can

April 2024 56
be substantial). Pay attention to the vessel’s orientation concerning swell, as pitching into a
significant swell (or, in some cases, steering noise at oblique angles to the swell) can impact the
results. Run separate tests to assess noise levels versus vessel heading relative to the prevailing
swell, allowing surveyors to identify vessel orientations that may reduce noise levels and improve
mapping data.
The noise floor can vary for each system; therefore, absolute noise thresholds are difficult to
define across systems. The best indicator that the noise floor is too high is an apparent reduction
in swath coverage and degradation of the data. Therefore, speed-noise tests are most valuable
when compared to previous tests to monitor changes in the platform noise levels (e.g., due to
engine lineup or other machinery alterations, especially pre- and post-shipyard), track the health
of the system (e.g., RX element failure), and provide an early indication of potential performance
reduction over time. The NSF-funded MAC (GitHub oceanmapping community, 2022) provides
guidance and software tools for collecting RX noise level data for Kongsberg systems; other
manufacturers may provide similar resources.
2.5.2.6 Extinction Testing
Extinction testing is conducted annually or opportunistically on transits to determine the
coverage achievable by the multibeam sonar across the full range of operational depths (i.e.,
from shallow water out to full extinction, if possible). This information is helpful for line planning
and provides an early indication of performance degradation. Reductions in coverage can
indicate increased vessel noise levels or other hardware issues, such as reduced transmission
strength.
Repeating transit lines over a wide range of depths (e.g., transits in and out of a particular port
on the same course) can provide a valuable comparison of swath coverage over the years. It is
beneficial to collect pre- and post-shipyard data to ensure no changes in vessel noise that may
limit swath coverage (or to document any improvement, such as from hull and transducer
cleaning).
Several multibeam processing packages offer coverage assessment tools that can be used with
cleaned data from various formats within a processing project. The MAC (GitHub oceanmapping
community, 2022) provides guidance and software tools for collecting and assessing swath
coverage data with Kongsberg systems; other manufacturers may provide similar resources.
2.5.3 Hardware Maintenance
2.5.3.1 Transducer Face Cleaning
Heavy biofouling can impact transmit and receive levels and severely degrade the signal-to-noise
ratio. Thus, the face of the transducers (both the transmit and receive arrays) and hull areas near
the arrays should be visually inspected by scuba divers throughout the year for significant
biofouling. Cleaning may be necessary multiple times per year and must be done per the
manufacturer’s recommendations to remove biofouling without damaging the transducer faces.

April 2024 57
During every dry dock, the transducers should be cleaned and painted with anti-fouling paint,
and the epoxy material adhering the transducers to the hull should be replaced as necessary to
reduce the potential for cavitation due to non-smooth surfaces. It is critical that all transducer
cleaning and painting steps strictly follow the manufacturer’s procedures for preparation, paint
type, and thickness of application. The mass of the paint on the transducer face directly impacts
its frequency response; misapplication can severely degrade the adequate TX power and RX
sensitivity, resulting in significantly reduced coverage and accuracy.
2.5.3.2 Impedance Testing
Most transducers have a useful life of roughly 10 years before showing performance degradation.
Impedance testing, conducted by the sonar manufacturer, should be done throughout the
system’s life to monitor system health. The manufacturer can advise appropriate testing
intervals.
Some systems offer self-testing functions that should be run routinely (e.g., before and after each
survey) and may offer proxies for impedance testing. These are not substitutes for direct
impedance analyses of individual transducer channels but may help to alert users to new element
failures or general trends across an array. The MAC (GitHub oceanmapping community, 2022)
provides guidance and software tools for collecting and assessing Built-In Self-Tests (BISTs) for TX
and RX Channels data with Kongsberg systems; other manufacturers may provide similar
resources.
2.5.4 Sound Speed Correction
2.5.4.1 Vertical Sound Speed Profiling
It is necessary to know the speed of sound through the water column to resolve the depth from
the two-way travel time of the ping:
Range = [(Two-way travel time)/2] ∗ speed of sound.
When profiling at oblique angles, variations in sound speed will also change the path of sound
through the water, affecting not just the observed range but also the lateral position of the
observed sounding; thus, sound speed profiles are essential for MBES. As the speed of sound
varies depending on environmental conditions, it must be captured at frequent enough intervals
to resolve the spatial and temporal variability of the area.
Sound speed profiles can be collected with various instruments, such as CTDs, expendable
bathythermographs (XBT), XSVs, MVPs, and Remotely operated vehicles (ROV)-mounted sensors.
Process profiles into a format that can be applied in the multibeam acquisition software; at a
minimum, this can typically be done with software provided with the sound speed sensor or
through profile processing tools in the multibeam acquisition software. More streamlined
approaches for processing and monitoring sound speed are available with third-party software
such as Sound Speed Manager (HydrOffice, 2023). HydrOffice, led by the University of New
Hampshire Center for Coastal and Ocean Mapping/Joint Hydrographic Center, with significant
April 2024 58
collaboration with NOAA and other agencies worldwide, provides open-source tools to support
ocean mapping, including planning and processing sound speed profiles (HydrOffice, 2023).
2.5.4.2 Surface Sound Speed Measurement
Sound speed at the level of the transducer is a critical component for beam steering, and any
error in the launch angle of the beams will propagate throughout the entire water column.
Observe sound speed at the transducer and input to the sonar system in real-time for application
(i.e., beamforming) during acquisition.
Monitor the surface sound speed in the acquisition software, with particular attention to
differences from the most recent sound speed profile at that depth. Sound Speed Manager
(HydrOffice, 2023) can monitor these changes and plan for new profiles, as well as confirm that
the surface sound speed value is applied at the correct depth in the profile (thereby also
confirming other parameters, such as waterline).
2.6 Lidar Protocols
These lidar protocols are derived from the Joint Airborne Lidar Bathymetry Technical Center of
Expertise (JALBTCX) Topo-Bathy Lidar Specification, currently under development by JALBTCX
partner agencies U.S. Army Corps of Engineers (USACE), Naval Oceanographic Office
(NAVOCEANO), NOAA, and USGS.
2.6.1 Collection Requirements
Although lidar collection parameters are highly dependent on the environment of the project
area and numerous other factors, this chapter defines those collection requirements that must
be met to achieve consistent topo-bathymetric lidar collection for IWG-OCM.
2.6.1.1 Collection Area
The collection area, or Defined Project Area (DPA), is defined by the area of interest, plus a buffer
of 100 m. Data collection and deliverables are required for all production flight lines. The DPA
should include any ground truth observations used to validate the accuracy of a survey.
2.6.1.2 Quality Level
Table 2.1 contains reasonable specifications for THU, TVU, sample density, and system depth
performance. The cells highlighted in green are the typical acceptable level for each parameter
to meet the requirements of the JALBTCX partner agencies (USACE, NAVOCEANO, NOAA, and
USGS). These specifications apply to bathymetric lidar data and bathymetric data collected as
part of a topo-bathymetric lidar survey.

April 2024 59
Table 2.1. Specification matrix for uncertainties of THU, TVU, sample density, and system depth
performance for bathymetric data. All uncertainties are given at the 95% confidence level. For each
bathymetric parameter, the matrix includes a range of values for parameter uncertainty. Cells outlined
in black are minimum specification to meet interagency requirements.
A. Relationship of parameter values to standing Hydrographic Survey Orders established in the
International Hydrographic Organization S-44 Standards for Hydrographic Surveys
Range of Values
Parameters
Depth THU
(m)
20
10
5
2
1
0.5
0.25
Depth THU
(% of depth)
10
5
2
1
0.5
0.25
0.1
Depth TVU “a”*
(m)
1
0.5
0.3
0.25
0.2
0.15
0.1
Depth TVU “b”*
(m)
0.023
0.020
0.013
0.010
0.0075
0.0040
0.0020
Sample Density
(m
-2
)
0.04
0.25**
2
3
5
10
20
- IHO Order 2
- IHO Order 1a/b, Bathy QL 4b
- IHO Special Order, Bathy QL 0b/1b
- IHO Exclusive Order
- Both IHO Special Order, Bathy QL 0b/1b and IHO Exclusive Order

April 2024 60
B. Relationship of parameter values to the Interagency Working Group on Ocean and Coastal Mapping
Bathymetric Lidar Quality Levels
Range of Values
Parameters
Depth THU
(m)
20
10
5
2
1
0.5
0.25
Depth THU
(% of depth)
10
5
2
1
0.5
0.25
0.1
Depth TVU
“a”*
(m)
1
0.5
0.3
0.25
0.2
0.15
0.1
Depth TVU
“b”*
(m)
0.023
0.020
0.013
0.010
0.0075
0.0040
0.0020
Sample Density
(m
-2
)
0.04
0.25**
2
3
5
10
20
THU = total horizontal uncertainty
*TVU = total vertical uncertainty (±
√
𝑎
2
+
(
𝑏 ∗ 𝑑
)
2
; a = portion of uncertainty that does not vary
with depth; b = a coefficient representing that portion of uncertainty that varies with depth; d =
depth; 𝑏 ∗ 𝑑 = portion of uncertainty that varies with depth)
** - Note that in optically deep water, bathymetric lidar systems produce data at lower sample
density.
- Bathy QL 0b/1b (1b has lower sample density)
- Bathy QL 2b/3b (3b has lower sample density)
- Bathy QL 4b
- Both Bathy QL 0b/1b and Bathy QL 2b/3b
- Both Bathy QL 2b/3b and Bathy QL 4b
April 2024 61
2.6.1.4 Multiple Returns
Data collection should be capable of multiple returns per measurement (pulse, waveform, or
pixel) for the determination of water surface, seafloor, and midwater returns.
2.6.1.5 Data Voids
Data voids may result from operational or environmental conditions, including:
• Water clarity
• Turbidity plumes
• Bubbles and sediment entrained in the water column and surface foam from breaking
waves
• Areas of low bottom reflectivity, such as mud or submerged aquatic vegetation
• Aircraft motion
Careful planning ensures complete data coverage.
2.6.1.6 Spatial Distribution and Regularity
Plan and execute collections to produce aggregate bathymetric point data that approach a
uniform, regular lattice of points.
2.6.1.7 Collection Conditions
Consider the following collection conditions relative to survey intent:
• Cloud and fog between the aircraft and ground
• Snow and ice cover on land and water
• Extensive flooding or any other type of inundation
• Leaf-on or leaf-off vegetation condition
• High or low tides, water level, or river flow
• Submerged aquatic vegetation biomass
2.6.1.8 Depth Range
Depth performance of airborne lidar bathymeters varies based on system design factors such as
laser power, optical element size, and receiver sensitivity. Estimated lidar system depth
performance should be evaluated against desired depth range and expected water clarity in the
project area to ensure the system selected is capable of meeting survey objectives. Consider
minimum depth performance to ensure seamless coverage from land to water.
2.6.2 Data Processing and Handling
Elevations and depths should be reported in metric units.
April 2024 62
2.6.2.1 Time of GPS Data
Record GPS data as Adjusted GPS Time (Standard [satellite] GPS time minus 1*10
9
) at a precision
sufficient to allow unique timestamps for each pulse.
2.6.2.2 Datums
The CRS for latitude, longitude, and ellipsoid heights should be NAD 83 using the most recent
adjustment published by the National Geodetic Survey (NGS) (currently NAD 83, epoch 2010.00,
realization of 2011).
The vertical datum for orthometric heights should be NAVD 88. The geoid model used to convert
between ellipsoid and orthometric heights should be the latest hybrid geoid model of NGS,
supporting the latest realization of NAD 83 (currently [2017] GEOID model).
Use alternate vertical datums in areas where a current geoid model is unavailable, including
Alaska, American Samoa, Commonwealth of the Northern Mariana Islands, Guam, Hawaii, Puerto
Rico, U.S. Virgin Islands.
2.6.2.3 File and Point Source Identification
At the time of its creation and before further processing, each swath should be assigned a unique
file source ID. Each point within the swath should be assigned a point source ID equal to the file
source ID. The point source ID on each point shall be persisted unchanged throughout all
processing and delivery.
2.6.2.4 Positional Accuracy Validation
Before the classification and development of derivative products from point data, the absolute
and relative accuracy of the point data should be verified.
2.6.2.5 Relative Vertical Accuracy
Relative vertical accuracy refers to the internal geometric quality of a lidar dataset without regard
to surveyed ground control.
2.6.2.6 Intrastate Precision (Smooth Surface Precision)
Intraswath precision should be assessed on large, flat, hard-surfaced, open areas (for example,
parking lots or large rooftops) containing only single return lidar points and for the entire swath
width.
2.6.2.7 Interswath (Overlap)
Interswath consistency should be assessed at multiple locations within swath overlap in non-
vegetated areas of only single returns and with terrain slopes of less than 10 degrees for the
following:
• Adjacent, overlapping parallel swaths
• Project swaths in opposing flight directions
April 2024 63
• Crosslines
• Adjacent, overlapping flight blocks, i.e., lifts
2.6.2.8 Absolute Vertical Accuracy
The absolute vertical accuracy of the lidar data and the derived digital elevation model (DEM)
should be assessed and reported under the American Society for Photogrammetry and Remote
Sensing (ASPRS, 2014) for topographic data collected ancillary to bathymetry and wading depths.
Four absolute accuracy values shall be assessed and reported:
• Non-vegetated Vertical Accuracy (NVA) for the point data.
• Vegetated Vertical Accuracy (VVA) for the point data.
• NVA for the DEM.
• VVA for the DEM.
Assess NVA and VVA for the point data by comparing checkpoints to a triangulated irregular
network (TIN) constructed from ground-classified lidar points.
Assess NVA and VVA for the DEM by comparing checkpoints to the final bare-Earth surface.
For bathymetric lidar and sonar survey, data should meet IHO S-44 Standards for Hydrographic
Surveys.
2.6.2.9 Point Classification
The minimum required classification scheme for lidar data is found in Table 2.2. All points within
the minimum classification scheme that are not flagged as withheld should be classified
appropriately.
2.6.2.10 Classification Consistency
Point classification should be consistent across the entire project, with no noticeable variations
in the character, texture, tiles, swaths, lifts, or other non-natural division classification quality.
2.6.2.11 Intensity Values
Intensity values are required for each bottom return where water conditions allow.
2.6.2.12 Tiles
Establish and use a single non-overlapping project tiling scheme for all tiled deliverables. The
tiling scheme should use the same CRS and units as the point data. The tile size shall be an integer
multiple of the cell size for raster deliverables. Index the tiles in x and y to an integer multiple of
the x and y dimensions of the tile. Edge-match the tiled deliverables seamlessly, without gaps,
and conform to the project tiling scheme without added overlap.

April 2024 64
2.6.2.13 Point Duplication
Do not duplicate lidar points (x, y, z, and timestamp) within the project. Near duplication (a group
of points duplicated but with a slight but consistent spatial offset) will be regarded as duplication.
Table 2.2. Bathymetric/topographic lidar data classification scheme.
Code
Description
1
Processed, but unclassified
2
Bare-Earth ground
7
Low noise (low or high; manually identified, if necessary)
9
Water (topographic sensor)
17
Bridge deck
18
High noise (high manually identified, if necessary)
20
Ignored ground (typically breakline proximity)
21
Snow (if present and identifiable)
22
Temporal exclusion (topographic sensor; typically non-favored data in intertidal zones)
40
Bathymetric Point, Submerged Topography (e.g., seafloor or riverbed)
41
Water Surface (sea/river/lake surface from bathymetric or topographic-bathymetric
lidar; distinct from Point Class 9, which is used in topographic-only lidar and only
designates “water,” not “water surface”)
42
Derived water surface (synthetic water surface location used in computing refraction
at water surface)
43
Submerged object, not otherwise specified (e.g., wreck, rock, submerged piling)
44
IHO S-57 object, not otherwise specified
45
No-bottom-found (bathymetric lidar point for which no detectable bottom return was
received)
64
Submerged Aquatic Vegetation
65
Denotes bathymetric bottom temporal changes from varying lifts, not utilized in
bathymetric point class
2.6.3 Deliverables
Delivery is required for all ancillary products that support the processing of the lidar dataset,
including imagery and all metadata associated with the data.
2.6.3.1 Metadata
Product metadata files shall comply with ISO 19115-1:2014 Geographic information - Metadata
- Part 1: Fundamentals.
Record the CRS, epoch, realization, geoid model, NGS model filenames, or information describing
alternate vertical datum separation from ellipsoid in metadata.
April 2024 65
2.6.3.2 Reports
Report deliverables shall include the following:
• A survey report detailing the collection of all ground survey data
• A lidar mapping report that describes:
o Data acquisition and processing
o GNSS-inertial processing
o Point cloud creation
o Geometric quality
o Production
2.6.3.3 Classified Point Data
2.6.3.3.1 ASPRS LAS File Format
All point deliverables should be in LAS format, version 1.4-R15, using Point Data Record Format
6, 7, 8, 9, or 10. Data producers are encouraged to review the LAS specification version 1.4–R15
in detail (ASPRS, 2011). LAS files should conform to the following items:
• Include a unique identifier for the dataset in the LAS file(s) as a Globally Unique
Identifier (GUID).
• Correct and properly formatted georeference information as Well-Known Text (WKT)
(OGC, 2001) included in all LAS file headers.
• The encoding tag in the LAS header should be set properly. See LAS specification
version 1.4–R15 (ASPRS, 2011) for additional information.
• Intensity values in 16-bits. See LAS specification version 1.4–R15 (ASPRS, 2011) for
additional information.
• Tiled delivery, without overlap, using the project tiling scheme.
• Classification, as defined above, is at a minimum.
2.6.3.3.2 Use of the LAS Withheld Bit Flag
The withheld bit flag, as defined in LAS specification version 1.4–R15 (ASPRS, 2011), shall only be
used to identify points that cannot be interpreted as valid surface returns. Examples include
outliers, blunders, geometrically unreliable points, aerosol back-scatter, laser multi-path,
airborne objects, and sensor anomalies. Preferred data delivery treatment is to exclude withheld
points from delivered data.
2.6.3.4 Bathymetric Lidar Waveform
If collected, deliver bathymetric lidar waveforms. Deliver waveforms in:
• LAS deliverables using external auxiliary files with the extension “.wdp” to store
waveform packet data. See LAS specification version 1.4–R15 (ASPRS, 2011) for additional
information, or
• Alternate, well-documented, open-source formats, such as *.cpf

April 2024 66
2.6.3.5 First-Return Surface (Raster Digital Surface Model)
Use lidar point data falling into the “processed but unclassified,” “bare earth,” and “bathymetric
point, submerged topography” classes to generate the first-return digital surface model (DSM).
Generate the first-return DSM to the limits of the DPA in a 32-bit floating-point GeoTIFF raster
format. GDAL version 2.4.0 should be used to populate GeoTIFF keys and tags, or as otherwise
agreed in advance and specified in the Task Order. Deliver DEM data in the same CRS and tiling
scheme as the lidar data, with no edge artifacts or mismatches.
Georeference information should be delivered in or accompany each raster file, as appropriate
for the file format. This information should include horizontal and vertical systems; the vertical
system name should include the geoid model used to convert from ellipsoid heights to
orthometric heights.
2.6.3.6 Bare-Earth Surface (Raster Digital Elevation Model)
Use lidar point data falling into the “bare earth” and “bathymetric point, submerged topography”
classes to generate a bare-Earth DEM.
Generate the bare-Earth DEM to the limits of the DPA in a 32-bit floating-point GeoTIFF raster
format. GDAL version 2.4.0 should be used to populate GeoTIFF keys and tags or as otherwise
agreed in advance and specified in the Task Order. Deliver DEM data in the same CRS and tiling
scheme as the lidar data, with no edge artifacts or mismatches.
Georeference information shall be delivered in or accompany each raster file, as appropriate for
the file format. This information shall include horizontal and vertical systems; the vertical system
name shall include the geoid model used to convert from ellipsoid heights to orthometric heights.
Remove bridges; the bare-Earth surface below the bridge should be a continuous, logical
interpolation of the apparent terrain lateral to the bridge deck. The bare-Earth interpolation shall
begin at the junction of the bridge deck and approach structure where abutments are clearly
visible.
Roads or other travel ways over culverts should remain intact on the surface.
2.6.3.7 Breaklines
Deliver breaklines used to enforce a logical terrain surface below a bridge.
2.7 References
American Society for Photogrammetry and Remote Sensing. 2011. LAS Specification 1.4 - R15.
https://www.asprs.org/wp-content/uploads/2019/07/LAS_1_4_r15.pdf.
American Society for Photogrammetry and Remote Sensing. 2015. Photogrammetric
Engineering & Remote Sensing. 81(3). https://www.asprs.org/wp-
content/uploads/2015/01/ASPRS_Positional_Accuracy_Standards_Edition1_Version100_N
ovember2014.pdf.

April 2024 67
GitHub oceanmapping community. 11 July 2022. “Assessment Tools.”
https://github.com/oceanmapping/community/wiki/Assessment-Tools.
Hydrographic Dictionary Working Group. 2019. “S-32 IHO - Hydrographic Dictionary /
Multilingual Reference for IHO Publications.” http://iho-ohi.net/S32/engView.php.
IHO. September 2022. “S-44 Edition 6.1.0.” https://iho.int/uploads/user/pubs/standards/s-
44/S-44_Edition_6.1.0.pdf
IHO. 2022. “Organization.” https://iho.int/en/.
Irish, J.L. and W.J. Lillycrop. 1999. “Scanning laser mapping of the coastal zone: the SHOALS
system.” ISPRS J. Photogrammetry Remote Sens. 54(2-3): 123-129.
https://doi.org/10.1016/S0924-2716(99)00003-9.
Lurton, X., Lamarche, G. 2015. Backscatter measurements by seafloor‐mapping sonars.
Guidelines and Recommendations. https://geohab.org/wp-
content/uploads/2018/09/BWSG-REPORT-MAY2015.pdf.
MAREANO Programme. 2017. Appendix B: Technical Specifications. Norwegian Mapping
Authority Hydrographic Service.
https://mareano.no/resources/files/om_mareano/arbeidsmater/standarder/Appendix-B-
Technical-Specifications-1.pdf.
HydrOffice. 2023. “HydrOffice: A Research Framework for Ocean Mapping.”
https://www.hydroffice.org/.
Multibeam Advisory Committee (MAC). 5 November 2021. Recommendations for Reporting
Vessel Geometry and Multibeam Echosounder System Offsets.
https://github.com/oceanmapping/community/blob/main/MAC%20Survey%20Report%20
Recommendations%20v1p0.pdf.
NOAA. n.d. a. “Welcome to VDatum!” https://vdatum.noaa.gov/welcome.html.
NOAA. n.d. b. “VDatum API Documentation.” Vertical Datum Transformation: Integrating
America’s Elevation Data. https://vdatum.noaa.gov/docs/services.html.
NOAA. n.d. c. “NOAA/NOS’s VDatum Terms of Use (Effective as of November 15, 2013).”
https://vdatum.noaa.gov/download_agreement.php.
NOAA OCS. HSSD 2024. Hydrographic Survey Specifications and Deliverables.
https://nauticalcharts.noaa.gov/publications/documents/HSSD_2024-1-01.pdf.
NOAA OCS. FPM 2021. Field Procedures Manual.
https://nauticalcharts.noaa.gov/publications/docs/standards-and-
requirements/fpm/field_procedures_manual_2020.pdf
NOAA OER. 2020. NOAA OER Deepwater Exploration Mapping Procedures Manual.
https://doi.org/10.25923/jw71-ga98.
National Ocean Mapping, Exploration, and Characterization Council of the Ocean Science and
Technology Subcommittee and Ocean Policy (NOMEC). June 2020. “National Strategy for
Mapping, Exploring, and Characterizing the United States Exclusive Economic Zone.”
https://oeab.noaa.gov/wp-content/uploads/2021/01/2020-national-strategy.pdf.
Picard, K., et al. 2018. Australian Multibeam Guidelines. Geoscience Australia, Canberra.
https://dx.doi.org/10.11636/Record.2018.019.

April 2024 68
Chapter 3: Seabed and Lakebed Backscatter
Tim Battista, NOAA
Bill Danforth, USGS
Steven Intelmann, NOAA
Eric Moore, USGS
Jeff Waldner, BOEM
3.1 Introduction
Common standards for acquiring, processing, and reporting acoustic seabed and lakebed
backscatter data have not been widely established. This chapter encourages advancement in
standard backscatter acquisition and processing methods, acoustic signal corrections, and image
processing steps. It describes backscatter, existing challenges in data usage, and applicable
protocols.
Backscatter information assists in determining the characteristics and composition of the
seabed/lakebed, sediment concentration levels in rivers or coastal waters, and classification of
benthic habitats (Kist, 2017). Sonar systems engineered to collect backscatter record information
about the physical acoustic properties of the seabed/lakebed by measuring the acoustic signal
return—i.e., the angle and strength of the returning sound wave reflected from the
seabed/lakebed—or suspended sediment. On a hard or rough seabed, such as a rock outcrop or
boulder field, there tends to be a more robust acoustic signal return than from a soft and smooth,
transmissive seabed like silt. Recording acoustic signal return ‘strength’ allows the backscatter
data to be post-processed into mosaics, georeferenced, and displayed as a color or grayscale
map. Examples of backscatter mosaics can be found in Schimel (2018) and online in the “NE
Bathymetry and Backscatter Compilation” (Ward et al., 2020).
Analyzing backscatter is more complex than bathymetry because it requires many more
parameters to be known or estimated, such as the loss and redistribution of acoustic energy or
the sensitivity of the specific sonar receiver. Coupled with this challenge, to use backscatter data
effectively once recorded, a pragmatic and smart calibration technique needs to be established
to get the best results. Modern multibeam systems can compensate for changes in signal
strength and angle through better processing technology, and artificial intelligence (AI) should
improve the post-processed interpretation of such ‘corrected’ backscatter returns. However,
seabed/lakebed acoustic backscatter observations are too rarely calibrated or they delivered
without any specified standard. Geometric and radiometric corrections need to be applied so
that individual surveys are internally consistent (John Hughes Clarke, University of New
Hampshire, 2020).
GeoHab established the Backscatter Working Group (BSWG) in 2015 (GeoHab, n.d.). The BSWG
is a multidisciplinary research consortium of internationally recognized experts in marine
acoustics, geophysics, spatial analysis, and ocean environmental science. The BSWG undertook a
robust process to develop guidelines that represent expert consensus, resulting in the publication
of Backscatter Measurements by Seafloor-Mapping Sonar: Guidelines and Recommendations
(Lurton and Lamarche, 2015), which presents techniques and procedures for the acquisition and

April 2024 69
processing of backscatter data. The NOMEC and SOMP writing team evaluated these guidelines
and agreed they should serve as best practices for the SOMP/NOMEC implementation.
3.2 Guidelines
Utilize Chapter 1 Data Management and the GeoHab BSWG published Backscatter
Measurements by Seafloor-Mapping Sonar: Guidelines and Recommendations (Lurton and
Lamarche, 2015).
3.2.1 Data Management
Management of backscatter data is necessary for efficient use, future access, and validation of
analytical and interpretative results. Raw and processed data (i.e., mosaics) should be archived.
For specific details and guidelines associated with minimum backscatter data requirements and
management (such as recommended file formats, metadata, data archival, etc.), see Chapter
1.6.2.
3.2.2 Raw Data Acquisition
Below is essential information to be confirmed in data files and/or survey reports to increase
usability:
• Vessel configuration
o Survey vessel draft
o Applied system offsets (e.g., measured offset between the IMU to transducers,
IMU to navigation antennas, waterline from transducers, transducer static
mount rotations)
• Sonar settings
o Operational frequency
o Pulse length: duration of the transmitted signal
o Transmission loss (TL)
▪ Loss of intensity, as acoustic waves propagate, due to geometric
spreading and absorption; a key parameter for acoustic systems as it
constrains the amplitude of the signal received directly dependent on
the signal‐to‐noise ratio (Lurton and Lamarche, 2015).
o Gains
▪ Time varied gain (TVG): A correction applied to the received echo level
to compensate for loss imposed by the distance between the target
and the sonar system using the law for expected propagation loss,
transposed into the time domain (Lurton and Lamarche, 2015).
▪ Echo level: The intensity level of the acoustic wave backscattered and
received by the sonar system; equal to the source level (SL) minus 2x
the TL plus the TS (Lurton and Lamarche, 2015).
April 2024 70
• Raw – no TVG
▪ Target Strength: the ratio between the intensity sent by the target
back toward the transmitter and the incident intensity (Lurton and
Lamarche, 2015).
• The manufacturer’s TVG applied for TL
▪ Backscatter: Generation of a non‐coherent echo of the acoustic wave
in the same direction as the angle of incidence (Lurton and Lamarche,
2015). The measure of sound reflected by the seabed and received by
the sonar.
• Manufacturer’s TVG applied for TL and footprint extent (FE):
Spatial resolution
▪ Customized TVG applied for TL and FE/Other
▪ Modeled TL and coefficient parameters
o Sound speed profiles
o Absorption profiles
o Power settings
o Cutoff angle across-track
*Note: If any settings are changed during the survey, document specific change(s) with
timestamp(s).
• Data coverage should report:
o Swath width versus trackline spacing
o Percent of seabed ensonified (e.g., 100%, 150%)
• If raw data are calibrated to a reference standard, the Level of Reference should be
reported as:
o No level reference considered
o Level reference from the manufacturer (nominal value)
o Relative reference level from calibration operation
o Absolute reference level from calibration operation
o Other
3.2.3 Data Processing and Mosaic Generation
Below is essential information to be confirmed in the data files and/or survey reports to increase
usability:
• Processing steps
o Describe data processing steps, including the application of sound speed,
filters, and removal of erroneous soundings
o Software and versions used
• Spatial reference
April 2024 71
o Coordinate system
o Horizontal datum
o Vertical datum
o Describe the process used to shift coordinate system or datum, if different
from raw data
o Options as stated in Backscatter measurements by seafloor‐mapping sonars:
Guidelines and Recommendations (Lurton and Lamarche, 2015):
▪ No geo‐reference
▪ Geographic reference (latitude, longitude)
▪ Projected reference (Mercator, UTM, other projected reference)
▪ Other
• Mosaicking settings
o Order (1st, last, top, bottom)
o Quality (angle, no specular)
o Statistical (average, median)
o Other
• Interpolation
o No interpolation
o Over NaN (“not a number” values) only
o Averaging/smoothing
o Other
• Visual representation
o Grey level 0‐255
o dB value
o Other
• Sound speed
• Tidal corrections
• Array directivity compensation
o Definition: Directivity Function = The angular pattern describing the spatial
spreading of the acoustical intensity radiated by a sound source or received by
a hydrophone expressed in decibels (dB) as log (base 10) of the intensity
normalized by its maximum value (most often along the axis of the main lobe)
o Options:
▪ No directivity compensation
▪ Compensation from a directivity pattern model (manufacturer)
▪ Equalization from a statistical average modulation (user)
▪ Customized model for directivity pattern (fitted to statistics)
▪ Other
• Seabed Incident Angle Compensation

April 2024 72
o Definition: Incidence angle = The angle of the sound ray path perpendicular to
the target interface at the impact point. For a flat horizontal seabed, it is the
angle with the vertical; horizontal incidence is 90°, and vertical incidence
(nadir) is 0°
o Options:
▪ Flat seabed, no refraction by Sound Velocity Profile (SVP)
▪ Flat seabed, SVP refraction
▪ Local across‐track slope (derived from one ping), no SVP refraction
▪ Local across‐track slope (derived from one ping), SVP refraction
▪ Local slope (from bathymetry, including along‐track slope), no SVP
refraction
▪ Local slope (from bathymetry, including along‐track slope), SVP
refraction
▪ Other
• Seabed Angular compensation, options:
o No Backscatter Angular Dependence (BSAD) compensation
o BSAD Compensation from a theoretical model (e.g., Lambert’s)
o Compensation from the model with adaptive parameters (e.g., Kongsberg
Maritime’s [KM’s] specular)
o Customized BSAD (model fitted to statistics)
o Other
• Reference angle, options:
o No reference angle
o Vertical incidence
o Fix angle at 45 degrees
o Other
3.3 References
GeoHab. n.d. “GeoHab.” http://geohab.org/.
Lurton, X. and G. Lamarche. 2015. Backscatter Measurements by Seafloor‐Mapping Sonars:
Guidelines and Recommendations. https://geohab.org/wp-
content/uploads/2018/09/BWSG-REPORT-MAY2015.pdf.
Schimel, A.C.G., J. Beaudoin, I.M. Parnum, T. Le Bas, V. Schmidt, G. Keith, and D. Ierodiaconou.
2018. “Multibeam sonar backscatter data processing.” Marine Geophysical Research. 39:
121–137. https://doi.org/10.1007/s11001-018-9341-z.
Ward, L.G., M. Bogonko, and P. Johnson. 2020. “Northeastern U.S. Bathymetry and Backscatter
Compilation: Western Gulf of Maine, Southern New England and Long Island.” University
of New Hampshire Center for Coastal and Ocean Mapping and Joint Hydrographic Center,
Durham.

April 2024 73
https://maps.ccom.unh.edu/portal/apps/webappviewer/index.html?id=5d314116ad094af
ebbd02ffc185164f6.
3.4 Additional Resources
Anderson, J.T., Holliday, D. V., Kloser, R., R., Reid, D. G., and Simard, Y. 2008. Acoustic seabed
classification: current practices and future directions. ICES Journal of Marine Science, 65:
1004-1011. https://doi.org/10.1093/icesjms/fsn061.
Costa, B. 20 May 2019. "Multispectral Acoustic Backscatter: How Useful Is it for Marine Habitat
Mapping and Management?" Journal of Coastal Research. 35(5): 1062-1079.
https://doi.org/10.2112/JCOASTRES-D-18-00103.1.
Holliday, D.V. 2007. “Theory of sound scattering from the seabed.” ICES Cooperative Research
Report, Pages 7-28.
https://www.lifewatch.be/fr/node/467?module=ref&refid=114460&printversion=1&dropI
MIStitle=1
Johnson, P. and Ward, L. 2021. “NE Bathymetry and Backscatter Compilation.” The Center for
Coastal and Ocean Mapping. https://ccom.unh.edu/project/NE-bathymetry-and-
backscatter-compilation.
LaFrance Bartley, M., T. Curdts, and S. Stevens. 2019. Procedures and Criteria for Evaluating
Benthic Mapping Data: A Northeast Coastal and Barrier Network Methods Document.
Natural Resource Report NPS/NCBN/NRR—2019/2050. National Park Service, Fort Collins,
Colorado. https://irma.nps.gov/DataStore/DownloadFile/633175.
Yeung, C. and R.A. McConnaughey. 2008. “Using acoustic backscatter from a sidescan sonar to
explain fish and invertebrate distributions: a case study in Bristol Bay, Alaska.” ICES Journal
of Marine Science. 65: 242–254. https://doi.org/10.1093/icesjms/fsn011.

April 2024 74
Chapter 4: Water Column Sonar
Adrienne Copeland, NOAA
Michael Jech, NOAA
Chris Taylor, NOAA
Carrie Wall, NOAA
4.1 Introduction
From the ocean surface to the seafloor, the water column is the largest (by volume) and least
explored biome on the planet (Webb et al., 2010), highlighting the need to collect sonar data
throughout the water column. While the NOMEC Strategy defines “ocean mapping” as activities
that provide comprehensive data and information needed to understand seafloor characteristics
such as depth, topography, bottom type, sediment composition and distribution, and underlying
geologic structure (NOMEC, 2020), water column acoustic data can be collected and stored in
conjunction with seafloor mapping data. Due to the sparse historical data from the water column,
water column sonar data should always be collected when feasible because this could provide
much-needed baseline information for the future. The tragic explosion and oil spill from
Deepwater Horizon is a case in point, where observations were made quickly after the disaster,
but baseline data were sorely lacking (Joye, 2015).
Sonar data collected in the water column can provide information about multiple features from
geological (e.g., benthic formations and hydrocarbon seeps [Watkins and Worzel, 1978; Weber
et al., 2012; Skarke et al., 2014]) to chemical/physical (e.g., temperature or salinity gradients) to
biological (e.g., scattering layers, concentrations/aggregations of organisms [e.g., Benoit-Bird and
Au, 2009]) (Figure 4.1; Colbo et al., 2014). Quantitative analysis of data collected using water
column sonars can inform fisheries stock assessments (e.g., Stienessen et al., 2019) and basin-
scale habitat modeling (McConnaughey and Syrjala, 2009); ecosystem-based management
(Koslow, 2009); seabed classification (Cutter et al., 2014; Anderson et al., 2008); turbulent
microstructure, internal waves, thermohaline staircases, and the thermocline (Proni and Apel,
1975; Stranne et al., 2017, 2018); and spatiotemporal distribution of organisms (Benoit-Bird and
Lawson, 2016).

April 2024 75
Water column sonar data can be collected using various tools and techniques. This chapter
focuses on the detection, observation, and exploration of water column sonar data:
1. logged during hydrographic survey or exploration mapping missions to investigate the
water column, and
2. collected during fisheries and ecosystem assessments using fishery sonars to map and
characterize the seafloor.
Enumeration and quantitative analysis of water column sonar data requires following strict data
calibration, acquisition, processing, and analysis protocols. This chapter provides information and
guidelines on the type of sensors and platforms used for water column sonar data collection,
recommended system parameters, calibration and QC techniques, data acquisition, and data
interpretation and derived products. It provides overarching guidance and recommendations for
the collection of mapping data throughout the water column but will not address manufacturer-
specific recommendations or specific use cases.
SOPs have been developed for specific use cases in fisheries and ecosystem assessments. Some
example protocols and websites with further guidance are listed below:
• A General Guide for Deriving Abundance Estimates from Hydroacoustic Data (Cornell
University & New York Sea Grant, n.d. a.)
• Fisheries Acoustics - A Practical Manual for Aquatic Biomass Estimation (FAO, 1983)
• NOAA OER Deepwater Exploration Mapping Procedures Manual (NOAA OER, 2020)
• Series of International Council for the Exploration of the Sea (ICES) Survey Protocols
(SISP 9 - IPS): Manual for International Pelagic Surveys (IPS) (ICES, 2015)
• SOPs for Fisheries Acoustics Surveys in the Great Lakes (Parker-Stetter et. al., 2009)
• Understanding Our Ocean with Water Column Sonar Data (NOAA NCEI, 2021)
Figure 4.1. Water column sonars: scientists use data from water column sonars to address
questions in fisheries, ecological interactions, and marine mammal and zooplankton research, as
well as seeps and hydrothermal vents. (Image source: Colbo et al., 2014)
April 2024 76
4.2 Instrumentation
Water column sonar data are collected primarily by acoustical systems that transmit sound into
the water and then listen for echoes from targets in the water column. Anything in the water
column with a density (kg m
-3
) and/or sound speed (m s
-1
) contrast to the surrounding water will
scatter sound, and it is the sound that is scattered back to the acoustic system (i.e., “backscatter”)
that is recorded for analysis.
Echosounders form an electrical signal based on operational parameters that are often
determined by the type of water column feature or organisms under study and the location of
the survey. The most common parameters selected by the user are pulse duration and acoustic
frequency (Table 4.1) in addition to transmit interval and transmit power. There are two primary
components of an echosounder, the transceiver and the transducer. When transmitting, the
transceiver generates an electrical signal that the transducer converts into an acoustic pulse in
the water. When receiving, the transducer converts arriving acoustic echoes into electrical signals
sensed by the transceiver. The echosounder processes the electrical signal and outputs the
digitized signal to a computer hard drive for analysis. It is important to remember that
echosounders measure a voltage, and all analyses after that measurement are assessed using
physical (i.e., physics of acoustics) and biological principles.
Different types of echosounders are defined by the type of pulse (e.g., frequency, bandwidth,
and pulse form) generated and the type of transducer used. Narrow bandwidth echosounders
transmit a continuous wave (CW) signal with a frequency range (bandwidth) that is usually
defined as less than 10% (±5%) of the center frequency, whereas wide bandwidth (i.e.,
broadband) echosounders transmit signals with bandwidths greater than that. Broadband signals
are typically linear frequency-modulated pulse forms known as “chirps,” in which the transmitted
signal’s frequency ranges from the lowest to the highest frequencies chosen and sweeps from
low to high (or vice versa) in a linear fashion. To use a musical analogy, narrowband signals are
like tapping on one key of a piano keyboard, whereas broadband signals are like laying your
forearm on a section of the keyboard and pressing keys from left to right (‘upsweep’) or right to
left (‘downsweep’).
Transducers comprise several individual piezoelectric elements that vibrate when excited by a
voltage. Transducers ultimately limit the bandwidth of the entire system; regardless of the
electronic signal’s bandwidth, the transducers will have a transmit and receive frequency range
that provides efficient and reliable signals. The size and shape of the acoustic beam is determined
by the arrangement and configuration of the elements and the frequency content of the input
(or received) signal. The echosounder electronics are “matched” to a specific transducer to form
a particular acoustic pulse configuration. There are two general classes of transducers: single
beam and multibeam.
4.2.1 Single Beam Echosounder Systems (SBES)
SBES transmit a pulse of sound formed into a coherent beam (i.e., beamforming), often conical
in shape (much like a flashlight beam), and upon reception, the entire beam is used to measure
volume scattering. This is the fundamental function of water column sonars, and every

April 2024 77
echosounder, from the fish finders on recreational boats to depth sounders on commercial
vessels, has SBES capability. In addition, some echosounders separate the beam into two, three,
or four sectors. A two-sector system is called “dual beam,” and three or four-sector systems are
called “split-beam” systems (Figure 4.2), although a split-beam is also called split-aperture. These
are all “single beams,” and the sampling volume is based on the total beamwidth (Figure 4.2).
4.2.2 Multibeam Echosounder Systems (MBES)
In the most common applications for ocean mapping, MBES transmit a broad swath in the
athwartship direction and narrow in the along-ship direction to ensonify a narrow slice of the
water column and strip of the seafloor with each ping cycle. MBES typically form hundreds of
receive beams, closely spaced across the swath, and can report water column and seabed
backscatter time series along the ray path for each. An MBES can form hundreds of beams, which
are adjacent to each other. These beams can be arranged in many configurations, with swaths
(bathymetric applications), two-dimensional arrays (fisheries sonars), and acoustic Doppler
current profilers (ADCPs) being the most common arrangements, each with particular purposes
and data products. Fishery MBES are a particular case of MBES designed specifically to sample
the water column and behave like multiple SBES.
Advantages to multiple beams include greater sampling volume than single beam systems
allowing more of the water column to be seen; narrow beams (often 1–2
o
, versus 7–11
o
for SBES)
for high spatial resolution; and electronically or mechanically steered beams to sample
downwards or sideways at a prescribed angle from the sea surface. Disadvantages are that MBES
requires a more complex transducer design, greater signal processing power, more complex
electronics, and more significant data storage resources than SBES and requires more physical
space for installation on the platform when two transducer arrays are used.

April 2024 78
4.3 Platforms
Platforms situate the sonar systems where they are most useful while adhering to logistic and
technological constraints. Surface vessels have been, and still are, the ubiquitous platform for
sonar systems. Vessels can provide nearly unlimited electricity and data storage capabilities and
accommodate onboard experts to evaluate data quality and intervene when quality degrades.
However, vessel-based data collection can be limited by sea state; large overall costs to build,
maintain, and staff vessels; and orientation of the echosounders on the sea surface. Alternative
platforms have been developed to overcome these limitations, such as towed vehicles, ROVs,
autonomous underwater vehicles (AUVs) and unmanned surface-vehicles (USVs), stationary
moorings, net-mounted and even animal-mounted systems (e.g., Tournier et al., 2021) (Figure
4.3). All these alternatives have advantages compared with crewed vessels, including increased
sampling over time and space, sampling in areas too dangerous for vessels and sampling close to
boundaries such as the seafloor, sea surface, and reefs. However, their limitations include
increased personnel to operate and maintain the platforms, the need for support vessels, and an
increased likelihood of losing the platform. To date, they have provided supplemental data, but
they have not supplanted vessels as the primary platform for collecting acoustic data.
4.4 System Parameters
The primary survey objective and selection or availability of acoustic systems dictates
echosounder configuration. This chapter guides the collection of water column sonar data,
Figure 4.2. Transducer resolution and beam width: single beam, dual beam, and split beam (image
source: Brandt [1996]; reproduced from the American Fisheries Society and Acoustics Unpacked
[Cornell University & New York Sea Grant, n.d. b.]).

April 2024 79
whether the system’s primary purpose is to map the seafloor (e.g., hydrographic MBES for
surveys of the seafloor) or the water column.
The frequency range and energy in the pulse of the sound transmitted by the echosounder
influence range and resolution capabilities for detecting features in the water column and the
seafloor’s depth. Water column features vary widely in density and sound speed (i.e., acoustic
impedance) relative to the medium; therefore, expectations of the relative magnitude of acoustic
backscatter, range from the transducer, and background noise should be considered when
selecting the appropriate frequency and system parameters (Table 4.1). Higher frequencies are
absorbed by the water more quickly than lower frequencies, generally resulting in a shorter-
range capability.
Figure 4.3. Ship-borne and alternative platform-deployed acoustical technologies for surveying fish in
the pelagic and demersal regions: multibeam sonars, represented by the blue fan-shaped beams,
significantly increase the sampling volume over single-beam echosounders (orange beam). Stationary
transducers sample at one location over time, providing information on short-term to long-term
behavior; these transducers are often attached to buoys for power and data storage and transmission.
Autonomous underwater vehicles, towbodies, and remotely operated vehicles position acoustical and
optical instrumentation near the features of interest. Decreasing the range to the feature results in
fewer extraneous targets and less sound absorption at higher frequencies, thereby improving
detection and quantification of fish at boundary surfaces, but at the cost of reduced sampling volumes.
(Image source: Jech et al., 2007)

April 2024 80
Table 4.1. Examples of typical range limits for detecting biological scatterers and the seafloor across a
range of narrowband frequencies (assuming CW pulse forms) for echosounders.
Frequency (kHz)
Pulse Duration (ms)
Biological Detection
(m)
Bottom detection
(m)
12
8
1500
10,000
18
4
1000
7,000
38
1
500
2800
70
1
300
1200
120
0.5
(1 for multi-frequency
techniques)
200
500
200
0.5
(1 for multi-frequency
techniques)
100
200
400
0.25
75
200
Note: These values can be adjusted by the operator to match survey requirements within the limitations
of the echosounder system. In addition, broadband systems offer additional frequency and pulse
characteristics not specified here.
The characteristics of the transmitted pulse can directly influence the detection of features above
the background noise and signal attenuation. Generally, a longer pulse length carries more
acoustic energy, and the returning backscatter can be easily differentiated from background
noise and longer ranges. However, a longer pulse length in narrow frequency bandwidth (CW)
can reduce the ability to resolve single targets (e.g., fish) in close vertical range or separate
targets close to the seafloor. By contrast, for broadband or frequency modulated (FM) signals,
the range resolution for similar target types is determined by the frequency bandwidth of the
transmitted pulse (Lurton, 2002). Often, operators will select shorter pulse lengths in shallow
water (0.2 ms pulse length for less than 200 m) to optimize range resolution and longer pulse
lengths in deeper water (0.5 to 1.0 ms for greater than 200 m) to overcome signal loss and
attenuation. When using multiple narrow bandwidth SBES with varying center frequencies, use
equivalent pulse lengths to compare backscatter intensity across frequencies that may aid
biological classification (Korneliussen et al., 2008).
4.5 System Calibration
4.5.1 Accounting for Water Column Sound Speed and Motion
Monitoring the sound speed in the water column is essential for accurate signal processing and
data analysis, especially for MBES. MBES requires continuous measurement of the sound speed
at the transducer, and all echosounder systems require periodic measurements of the entire
water column, such as using a CTD profiler or an XBT. In addition, because the echosounder
systems are located on platforms riding on or in the water, monitoring platform motion (e.g.,

April 2024 81
heave, pitch, roll) is vital for SBES and critical for MBES calibration. These ancillary navigation and
attitude systems must be appropriately configured with system offsets, calibrated, and
synchronized to the echosounders, with data collected at appropriate rates.
4.5.2 Calibrating Single Beam Echosounders
Calibrating SBES systems accomplishes the primary goal of accounting for the variation in power,
electrical, or mechanical loss in an echosounding system across platforms or environments.
These results lead to surveys that provide comparable measures of the acoustic backscattering
strength of water column features when using the same frequency and operating parameters.
Demer et al. (2015) reviews procedures for calibrating single, split-beam echosounders in detail.
Scientific echosounders often have calibration routines built into the data acquisition and
controlling software, such as:
Calibrate a single beam transducer using a standard target such as a metal sphere of copper or
tungsten carbide, having known acoustic properties. Lower the sphere under the transducer to at
least a 10-meter range positioned in the center of the transducer beam (or “on-axis”) using one
or many lines from the surface (Figure 4.4). Apply total system gain adjustments to achieve a TS
matching the sphere’s theoretical “on axis” value for the frequency, bandwidth, pulse length,
pulse form, and environmental conditions (e.g., temperature, salinity, depth). Move the sphere
through the transducer beam to characterize changes in perceived signal strength as the sphere
moves off the central axis of the transducer.
The result is a model of the transducer beam pattern that can be applied to raw data to
compensate for the backscatter or TS of an acoustic scatterer regardless of its angular position in
the transducer beam.
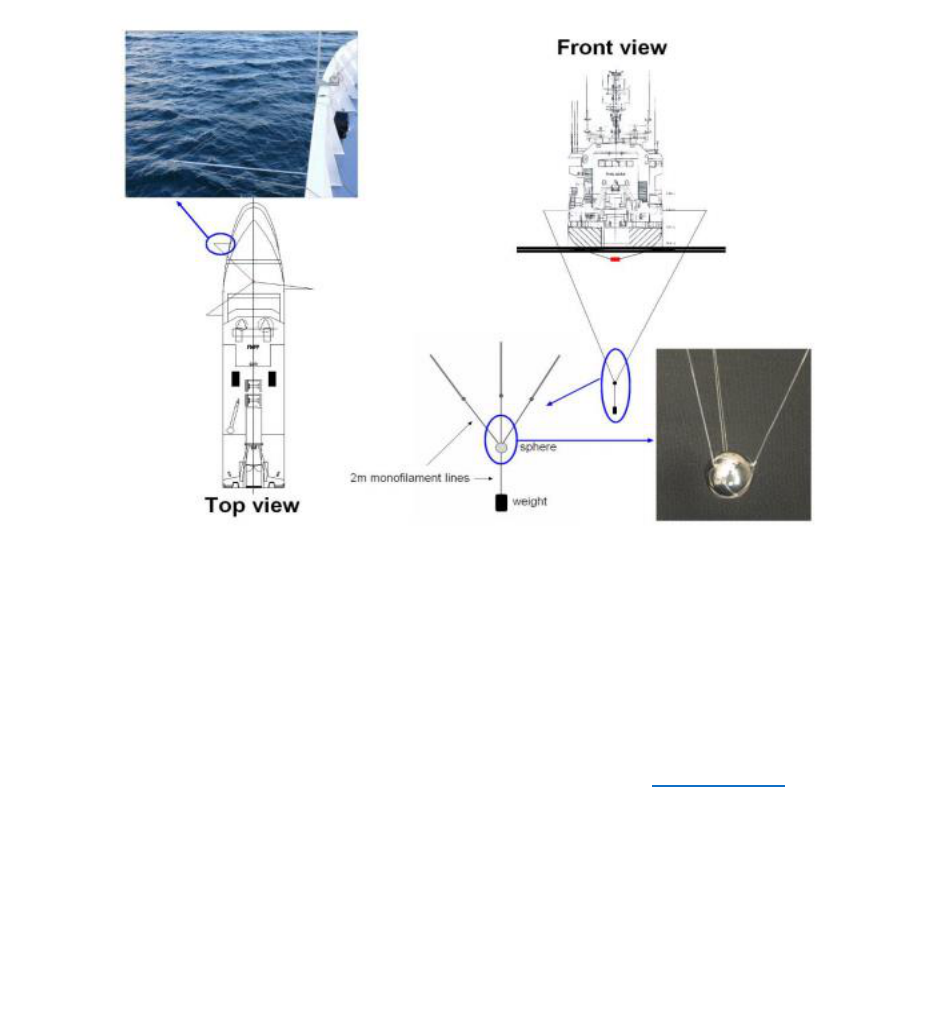
April 2024 82
4.5.3 Calibrating Multibeam Echosounders
Calibrations for hydrographic MBES include positional and motion calibration, and these
practices are covered in the Bathymetry chapter of this protocol (Chapter 2.5.2). Hydrographic
and fishery MBES collect backscatter intensities in the water column. Calibrating the water
column backscatter data from MBES with standard target methods allows for comparison across
echosounder systems, platforms, and ocean basins. Methods for calibrating water column
backscatter intensities for MBES is an active area of research. Demer et al. (2015) provide an
overview of three calibration levels for MBES. Each calibration optimizes for a different objective.
The levels are summarized here:
● Level 1 multibeam calibration accounts for specular reflection at normal incidence and
decreasing intensity with increasing grazing angle. This is useful for monitoring fish and
plankton at any angle away from the nadir.
● Level 2 multibeam calibration accounts for variation in backscatter between surveys due
to environmental variation or the performance or settings of a system within platforms.
This is important for comparing data from the same echosounder over time and ensuring
that changes in backscatter, relative abundance, or biomass estimates are not due to
changes in the acoustic system.
Figure 4.4. Transducer diagram: the calibration procedure for a single beam transducer with the
standard calibration target (metal sphere) below a vessel and centered within the transducer beam
(Image source: Demer et al. 2015).
April 2024 83
● Level 3 multibeam calibration permits the comparison of backscatter intensities across
various echosounders and platforms. This is important for comparing data among
echosounders, e.g., surveying the same species using different platforms.
Below are proposed protocols for multibeam water column backscatter calibration.
First, a standard calibration sphere, similar to that used for split-beam calibration, is moved
through the multibeam to measure and normalize system gains across the beam footprints. The
challenge in this example is to accurately position the sphere within the multibeam field of view,
which tends to be very narrow in one direction. In research experiments, a calibrated SBES
transducer is precisely positioned relative to the multibeam transducer and used to track the
sphere location within the multibeam angle (Lanzoni and Weber, 2011). Alternatively, a split-
beam echosounder measures backscatter intensity of the seafloor at similar grazing angles as a
MBES operating at equivalent frequencies (Ladroit et al., 2018).
A second MBES calibration approach uses a reference area of the seafloor that is surveyed for
backscatter intensity to compare MBES of similar operating frequencies (Weber et al., 2018). A
challenge arises when extending these calibrations into the water column, as the water column
targets do not have a constrained grazing angle (like the seafloor). Grazing angles of targets such
as fish or other scattering objects may lead to significant variation in backscatter intensity,
depending upon the angle of orientation relative to the transducer beam (Trenkel et al., 2008).
4.6 Quality Control
Criteria and thresholds of data quality can vary depending on the data application. The signal-to-
noise ratio is often a guide for monitoring data quality, where “signal” is the component of the
desired data, and “noise” is the unwanted component. For high signal-to-noise targets, such as
fish species with a gas-filled swim bladder, set relatively high-volume backscatter thresholds to
minimize scattering from other animals, such as zooplankton, squid, and jellyfish. Even a
moderate level of noise is acceptable because of the strong signal. For low signal-to-noise targets
such as krill, take more care to eliminate/minimize noise. Those in this threshold are more
sensitive to noise.
Removing/minimizing the apparent noise during analyses of water column data is often referred
to as “cleaning” the data (i.e., processing to highlight the ‘signal’). This involves removing the
echoes from the seafloor; transmitting pulse or ring-down of the transducer; wind- or cavitation-
generated bubbles; false bottom echoes (aka “ghost” echoes); attenuated pings; and impulse,
transient, and background noise from other sources, such as machinery (Jech and Schaber, 2021;
Ryan et al., 2015; De Robertis and Higginbottom, 2007). The seafloor and transmit pulse echoes
are orders of magnitude greater than scattering by biological organisms, so they must be
removed from analysis; otherwise, metrics such as abundance and biomass and spatial
distribution can be severely affected. Most processing software packages have algorithms to
detect the seafloor echo and methods to eliminate it from analysis, but check the automated
detections and correct any that are erroneous. For data close to the transducer, use a set depth
or range above which data are ignored to eliminate the transmit pulse and near-field from the
dataset. Set this depth consistently (for a given pulse length) throughout the survey but modify
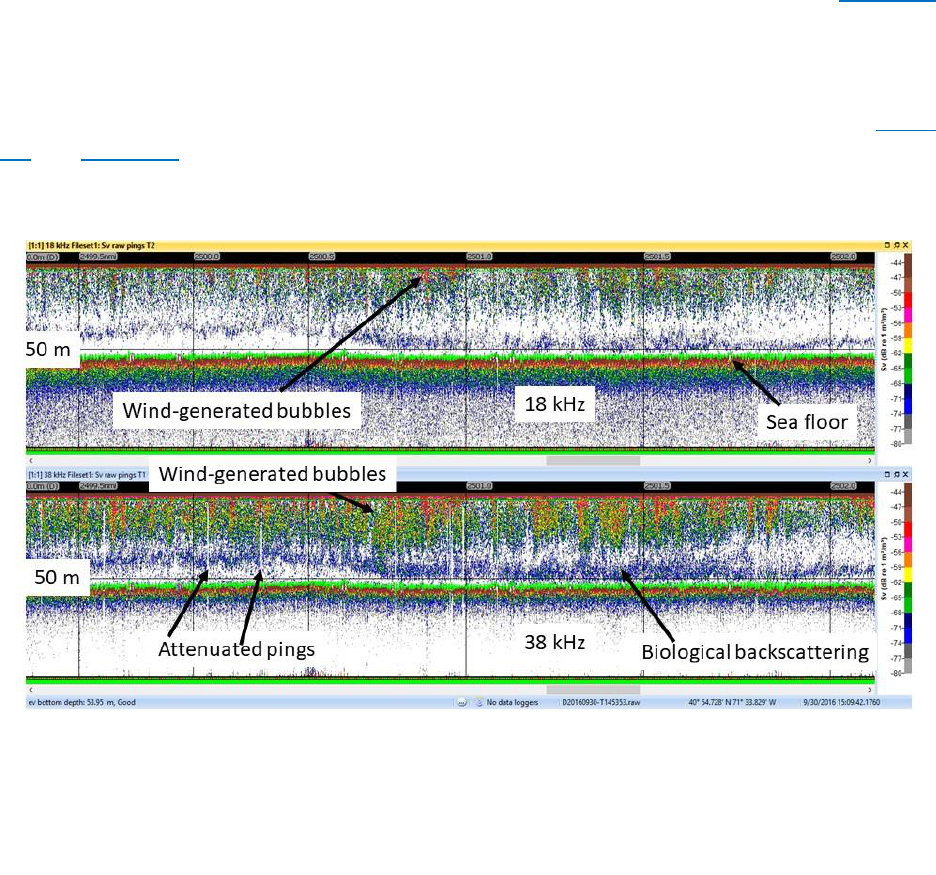
April 2024 84
to encompass near-surface bubbles when they occur due to inclement weather (see Figure 4.5
for an example of near-surface bubbles).
Remove the other main types of noise (impulse, transient, and background) algorithmically from
the data. Generic schemes for removing/minimizing these are given in Peña (2016) and Ryan et
al. (2015). Figure 4.6 and Figure 4.7 provide visual examples of various types of noise, with Figure
4.7 and Figure 4.8 providing detailed examples of the data before and after cleaning using the
techniques described in Ryan et al. (2015).
Figure 4.5. Wind-generated bubble echogram: 18 kHz (upper echogram) and 38 kHz (lower echogram)
data collected on NOAA Ship HB Bigelow during 30 September 2016 showing wind-generated bubbles
extending to about 40 meters depth and attenuated pings (vertical bands of empty scattering in the
38-kHz echogram). Data for this figure were collected using a Simrad ek60. (Image source: NOAA
National Marine Fisheries Service)
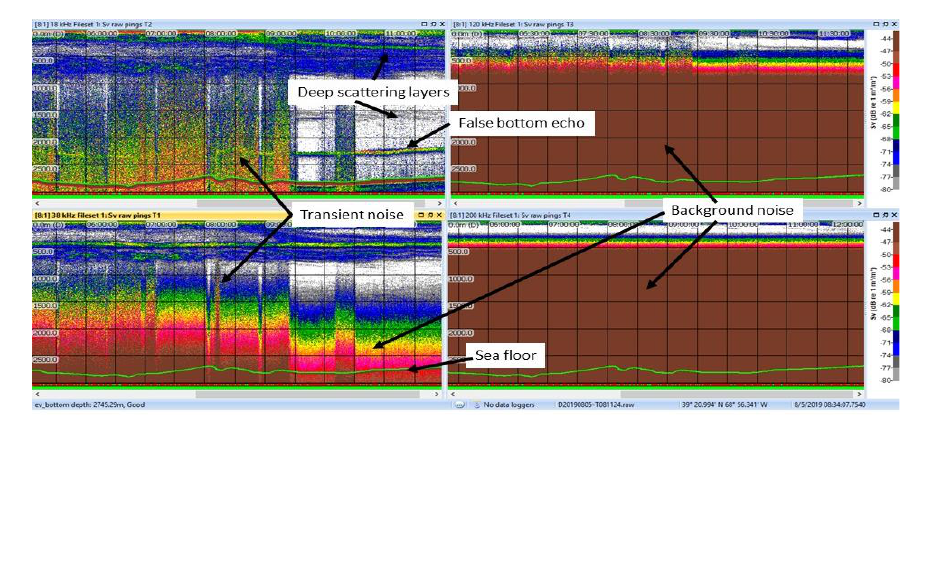
April 2024 85
Figure 4.6. Transient and background noise echogram: 18 kHz (upper left), 38 kHz (lower left), 120 kHz
(upper right), and 200 kHz (lower right) data collected during 5 August 2019 showing transient and
background noise, and a false-bottom echo (aka ghost echo). The portion of the echograms with less
transient noise were collected during a midwater trawl haul. Data for this figure were collected using
a Simrad ek60. (Image source: NOAA National Marine Fisheries Service)

April 2024 86
Figure 4.7. Echograms before and after noise reduction: 18 kHz data collected during 28 July 2019
showing impulse noise from an ultra-short baseline (USBL) acoustic system, a false-bottom echo, and
transient noise due to increased vessel speed (upper echogram), and the same echogram after noise
reduction using algorithms described in Ryan et al. (2015) (lower echogram). The portion of the upper
echogram not infested with transient noise was collected during a NOAA midwater trawl haul. Data
for this figure were collected using a Simrad ek60. (Image source: NOAA National Marine Fisheries
Service)

April 2024 87
Figure 4.8. Removing transient and background noise: 18 kHz (upper left), 38 kHz (lower left), 120 kHz
(upper right), and 200 kHz (lower right) data collected during 5 August 2019 showing results of
applying Ryan et al. (2015) algorithms to remove transient and background noise (compared to Figure
4.6). The 18 kHz echogram shows the remnants of the false-bottom echo, which could be removed
using algorithms developed by Blackwell et al. (2019). Data for this figure were collected using a
Simrad ek60. (Image source: NOAA National Marine Fisheries Service)

April 2024 88
4.6.1 Vessel Speed
Vessel speed can affect data quality, primarily when the transducers are located on the hull and
are susceptible to bubble sweep (i.e., bubbles entrained under the hull and transported across
the transducer faces) or when transducer cables and echosounder electronics are sensitive to
electronic or mechanical noise caused by increased load on engines and generators. Conduct
these tests to measure noise levels at various vessel speeds. For these tests, place the
echosounders into passive mode (no transmit, just reception) and vary the vessel speed (Figure
4.9). The influence of vessel speed can also be observed during active transmissions, especially
in deep water (Figure 4.10). Higher vessel speeds result in higher transient noise. See section
2.5.2.5 for additional information.
Figure 4.9. Speed vs. Noise: results of increasing vessel speed (top graph) on received noise (lower
image) of the multibeam on NOAA Ship Okeanos Explorer. The warmer the colors, the higher the
received noise. SOG = speed over ground; kts = knots. (Image source: Jerram et al., 2020)

April 2024 89
4.6.2 Sonar Synchronization
Operating multiple echosounders or other acoustically transmitting sensors (e.g., ADCPs, Doppler
speed loggers, fathometers, SBPs, acoustic tracking systems) can cause errant signals to be
detected as interference and noise on the water column systems (i.e., cross-talk). These signals
bias backscatter measurements or produce misleading signals during analysis. In all cases,
reporting and understanding the full complement of sensors operating during a mission is key to
providing sufficient context for later data analysis and interpretation.
Many modern echosounders have built-in pulse synchronization options with customized
settings to synchronize and control pulse transmission when multiple transducers are operating
simultaneously. Pulse transmission (or ‘ping timing’) control software can advance or delay
transmitted pulses to minimize or eliminate cross-talk between systems (Figure 4.11). During
hydrographic surveys, the MBES is often the primary sensor, and water column echosounders
are secondary sensors. Synchronization systems provide ping trigger delays to the secondary
echosounders to reduce noise, particularly transmissions from the secondary systems that may
impact the derivation of seafloor depth or backscatter with the primary system (i.e., multibeam).
Figure 4.10. Influence of vessel speed on transient noise: 18 khz data (lower echogram) and
corresponding vessel speed (upper image) collected during 28 July 2019 showing the influence of vessel
speed on transient noise. The vessel speed color scale ranges from 0 kts (red) to 15 kts (blue). Data
were collected using a Simrad ek60. See Figure 4.7 for description of acoustic scattering features.
Higher vessel speeds have greater transient noise. (Image source: NOAA National Marine Fisheries)
Service)

April 2024 90
Water column backscatter data from MBES can be viewed by ping as a “beam fan” (Figure 4.12)
during data acquisition, analysis, and interpretation. The properties of the transmitted pulse in a
hydrographic multibeam system result in some cross-talk across the detected beams. The
seafloor region facing the echosounder (i.e., typically near the nadir or directly beneath the
system) provides a significant return strength (specular reflection). The strength of this return is
apparent on the side lobes of the multiple RX beams, causing a prominent arch of noise at the
same range as the seafloor (known as the nadir ring). The area between the arch (or nadir ring)
and the seafloor is often significant enough to occlude lower strength scatterers like fish (Figure
4.12) and limits the sampling volume for detecting water column features. While methods can
be used to reduce the side lobe effect (Bourguignon et al., 2009), the backscattering strength of
targets below the side lobe effect will be biased. Some multibeam fishery systems use split-
aperture techniques and beamforming to reduce side lobe interference across multiple beams.
Figure 4.11. An image displaying examples of cross-talk between acoustic systems: for this example,
NOAA Ship Okeanos Explorer had two systems (a multibeam and a 70 khz SBES) that were pinging at
the same time. By delaying and synchronizing the ping rates of the two systems the interference
between the systems changed. Data were collected using a Simrad ek80. (Image source: NOAA Office
of Ocean Exploration and Research; Hoy, 2019)

April 2024 91
Noise can also be detected in multibeam data from asynchronous pulses from other acoustic
sources, appearing as rings in the beam fan. These pulses can contribute to errant seafloor
soundings or biased backscatter signals in hydrographic data acquisition.
4.7 Data Formats
The native formats of water column sonar files are proprietary and binary. Such file formats are
not easily handled; however, a recent effort by the fisheries acoustics community resulted in the
creation of netCDF4 files (Macaulay and Peña, 2018) upon the acquisition of an omnidirectional
sonar (Peña et al., 2021). Developing an open-source data format was completed in collaboration
with the academic community and sonar manufacturers. The scientific community continues to
lead the way towards a change in data acquisition format. Through a standard file format, the
data become more accessible to the scientific community and non-experts and better support
FAIR (Findability, Accessibility, Interoperability, and Reusability) data standards (GitHub ices-
eg/wg_WGFAST, 2022). Another benefit of open-source formats is alleviating the burden of
navigating file format changes by the manufacturer. Further, netCDF and cloud-friendly formats,
such as Zarr, facilitate the application of AI and scalable cloud processing, which are becoming
increasingly necessary as data rates increase.
Water column sonar storage rates vary significantly across echosounder systems, operating
frequency, depth or range, and transmitted pulse characteristics. For example, narrowband SBES
surveying in 500 meters water depth using a 1 ms pulse can provide 2 MB/min, whereas a
Figure 4.12. Fish detection in beam fans: example single ping “beam fan” from an MBES showing
detections of the seafloor, a school of fish in the water column, the side lobe seafloor detection, and
likely detection of a fish school within the seafloor detected in the side lobes. (Image source: NOAA
National Centers for Coastal Ocean Science)

April 2024 92
broadband echosounder at the same frequency and pulse length can generate over 86 MB/min.
MBES storage can exceed that of SBES by several orders of magnitude and multibeam data
collection for only seafloor sampling by two orders of magnitude (Rice and Greenway, 2017). A
200-400 kHz MBES sampling less than 50 meters depths can generate data at 30 GB/hour,
whereas a 200 kHz system sampling greater than 100 meters depths will generate about 5
GB/hour (Figure 4.13). The decrease in data rates with depth is not continuous but instead
related to a system’s preconfigured settings that automatically increase the pulse length
stepwise to optimize the signal to noise and resolution of depth detections. A longer pulse length
requires coarser digital sampling of the returning pulse for storage.
4.8 Data Interpretation and Derived Products
Processing raw water column sonar files requires specialized software and/or expert knowledge
of programming and the complexities of the sonar file structure. Software dedicated to
processing these complex files is available commercially and in open-source formats. Echoview
(Echoview Software, 2023) and Large Scale Survey System (MAREC, n.d.) are widely used
commercial software packages with visualization and analytical capabilities. Fledermaus’
Midwater Tool is another option focusing on the visualization of water column data (QPS, 2023).
Open-source code bases have been developed by experts in the community and distributed for
broader use. The deepwater fisheries acoustics team at New Zealand's National Institute of
Water and Atmospheric Research has developed ESP3, a Matlab-based software package
available as source code and compiled for the non-Matlab user (Ladroit et al., 2020). Python-
based software packages called PyEcholab (GitHub CI-CMG/pyEcholab, 2022) and Echopype (Lee
Figure 4.13. MBES frequencies and depths graph: example data rates for an MBES operating at three
frequencies and varying depth ranges (Rice and Greenway, 2017).

April 2024 93
et al., 2020) were developed by scientists at NOAA National Marine Fisheries Alaska Fisheries
Science Center and the University of Washington, respectively. Code bases in R are also available
including EchoR developed by scientists at Institut Français de Recherche pour l'Exploitation de
la Mer (Ifremer) (EchoR, 2022). These are just a few open-source repositories available to read
and process water column sonar data. A more comprehensive list found on the ICES GitHub site
will continue to be updated by the Working Group on Fisheries Acoustics, Science and Technology
with community input (GitHub ices-eg/wg_WGFAST, 2022).
There has been an exponential growth in the volume of water column sonar data collected over
the past decade attributed to collecting data on opportunistic sailings, increased numbers of
sonar-integrated uncrewed vehicles, and new data-intensive sonar systems. Interpretation or
classification of features in the water column has relied on manual assignment or statistical
methods for classification based on geometric form or frequency-dependent backscatter
response (Kloser et al., 2002; Korneliussen et al., 2008; De Robertis et al., 2010; Campanella and
Taylor, 2016). Scientists’ ability to continue relying on manual scrutiny or methods with limited
automation to analyze the new volumes of data collected is quickly diminishing. The
advancement of accessible AI tools in the last few years has opened many new possibilities for
the application of machine learning (ML) and deep learning (DL) models, facilitated by cloud
infrastructure and scalable compute engines, to complex scientific challenges (de La
Beaujardière, 2019; Malde et al., 2020). The challenges faced in efficiently and effectively
processing water column sonar data are well suited to ML/DL methods (Malde et al., 2020;
Michaels et al., 2019).
Although cloud-based processing enables scientists to bring the processing to the data, note that
processing routines designed for a single desktop will likely need to be altered to optimally and
cost-effectively take advantage of a cloud environment. Some recent advances in the application
of ML on water column sonar data include a comparison of different DL models to classify targets
from underwater sonar data (Yue et al., 2017); the use of deep convolutional neural networks for
acoustic target classification (specifically, lesser sand eels of the species Ammodytes marinus;
Brautaset et al., 2020); water column pattern decomposition from stationary sonars using
principal component analysis and nonnegative matrix factorization (Lee and Staneva, 2020); and
the use of supervised learning to facilitate classification, specifically of the seafloor (Sarr et al.,
2021).
4.9 Data Management
The long-term stewardship and centralized access to historical, ongoing, and future water column
sonar datasets are crucial to obtaining the most information and value from these essential data.
The NOAA NCEI has established an archive dedicated to these data where the continually growing
volume and diversity of archived data are globally accessible through the archive’s web-based
map viewer and Amazon Web Services bucket (NCEI, 2021).
For specific details and guidelines on how and where to archive water column sonar data, please
see Section 1.6.3.

April 2024 94
4.10 References
Anderson, J.T., Van Holliday, D., Kloser, R., Reid, D.G., and Simard, Y. 2008. “Acoustic seabed
classification: current practice and future directions.” ICES Journal of Marine Science.
65(6). https://doi.org/10.1093/icesjms/fsn061.
Benoit-Bird, K.J. and W.W. Au. 2009. “Cooperative prey herding by the pelagic dolphin, Stenella
longirostris.” The Journal of the Acoustical Society of America. 125(1): 125-137.
https://doi.org/10.1121/1.2967480.
Benoit-Bird, K.J. and G.L. Lawson. 2016. “Ecological insights from pelagic habitats acquired using
active acoustic techniques.” Annual Review of Marine Science. 8: 463-490.
https://doi.org/10.1146/annurev-marine-122414-034001.
Blackwell, R., R. Harvey, B. Queste, B. and S. Fielding. 2019. “Aliased seabed detection in
fisheries acoustic data.” arxiv.org. April 24, 2019.
https://doi.org/10.48550/arXiv.1904.10736.
Brandt, S. B. 1996. “Acoustic Assessment of Fish Abundance and Distribution.” In Fisheries
Techniques (2nd Edition), edited by B.R. Murphy and D.W. Willis. Bethesda: American
Fisheries Society.
https://www.scirp.org/reference/referencespapers?referenceid=1759633
Brautaset, O., A.U. Waldeland, E. Johnsen, K. Malde, L. Eikvil, A.B. Salberg, and N.O. Handegard.
2020. “Acoustic classification in multifrequency echosounder data using deep
convolutional neural networks.” ICES Journal of Marine Science, 77(4): 1391-1400.
https://doi.org/10.1093/icesjms/fsz235.
Bourguignon, S., L. Berger, C. Scalabrin, R. Fablet, and V. Mazauric. 2009. “Methodological
developments for improved bottom detection with the ME70 multibeam echosounder.”
ICES Journal of Marine Science. 66: 1015-1022. https://doi.org/10.1093/icesjms/fsp089.
Campanella, F. and J. C. Taylor. 2016. “Investigating acoustic diversity of fish aggregations in
coral reef ecosystems from multifrequency fishery sonar surveys.” Fisheries Research. 181:
63-76. https://doi.org/10.1016/j.fishres.2016.03.027.
Colbo, K., Ross, T., Brown, C., and T. Weber. 2014. “A review of oceanographic applications of
water column data from multibeam echosounders.” Estuarine, Coastal and Shelf Science.
145: 41-56. https://doi.org/10.1016/j.ecss.2014.04.002.
Cornell University & New York Sea Grant. n.d. a. “Sampling Effort.” Acoustics Unpacked: A
General Guide for Deriving Abundance Estimates from Hydroacoustic Data.
http://www2.dnr.cornell.edu/acoustics/SurveyDesign/Effort.html.
Cornell University & New York Sea Grant. n.d. b. “Introduction.” Acoustics Unpacked: A General
Guide for Deriving Abundance Estimates from Hydroacoustic Data.
www2.dnr.cornell.edu/acoustics/acousticsunpacked.html.
Cutter, Jr, G.R., and Demer, D.A. 2014. “Seabed classification using surface backscattering
strength versus acoustic frequency and incidence angle measured with vertical, split-beam
echosounders.” ICES Journal of Marine Science. 71(4): 882–894.
https://doi.org/10.1093/icesjms/fst177.
de La Beaujardière, J. 2019. “A geodata fabric for the 21st century.” Eos, November 25, 2019.
https://eos.org/features/a-geodata-fabric-for-the-21st-century.

April 2024 95
Demer, D.A., Berger, L., Bernasconi, M., Bethke, E., Boswell, K., Chu, D., Domokos, R., et al.
2015. Calibration of Acoustic Instruments. ICES Cooperative Research Report No. 326.
http://dx.doi.org/10.25607/OBP-185.
De Robertis, A., and I. Higginbottom. 2007. “A post-processing technique to estimate the signal-
to-noise ratio and remove echosounder background noise.” ICES Journal of Marine
Science. 64: 1282–1291. https://doi.org/10.1093/icesjms/fsm112.
De Robertis, A., D.R. McKelvey, and P.H. Ressler. 2010. “Development and application of an
empirical multifrequency method for backscatter classification.” Canadian Journal of
Fisheries and Aquatic Sciences. 67(9): 1459-1474. https://doi.org/10.1139/F10-075.
Echoview Software. 2023. “The world’s premier software package for hydroacoustic data
processing.” https://www.youtube.com/watch?v=IGo6x_uzG8Y,
EchoR. 2022. “EchoR”. https://gitlab.ifremer.fr/md0276b/echor.
FAO. 1983. “Fisheries Acoustics: A Practical Manual for Aquatic Biomass Estimation.” FAO
Fisheries Technical Paper 240 FIRM/T240. http://www.fao.org/3/x5818e/x5818e00.htm.
GitHub CI-CMG/pyEcholab. 11 January 2022. “pyEcholab.” https://github.com/CI-
CMG/pyEcholab/
GitHub ices-eg/wg_WGFAST. 30 June 2022. “Working Group on Fisheries Acoustics, Science and
Technology.” https://github.com/ices-eg/wg_WGFAST.
Hoy, S. 2019. “2019 RVTEC Meeting - Breakout10: NOAA SHIP Okeanos Explorer Sonar
Synchronization.”
https://www.unols.org/sites/default/files/201910rvt_breakout10_ekfmtradeoffs.pdf.
ICES. 2015. “SISP 9 - Manual for International Pelagic Surveys (IPS).” Series of ICES Survey
Protocols (2012–2020). https://doi.org/10.17895/ices.pub.7582
Jech, J. M., W. Michaels, and C. Wilson. 2007. “Improving Fisheries with Advanced Technology.”
In Our Living Oceans: Report on the Status of U.S. Living Marine Resources. NOAA
Technical Memorandum NMFS-F/SPO-80.
https://spo.nmfs.noaa.gov/sites/default/files/tm80.pdf.
Jech, J. M., Schaber, M., Cox, M., Escobar-Flores, P., Gastauer, S., Haris, K., Horne, J., et al. 2021.
“Collecting quality echosounder data in inclement weather.” ICES Cooperative Research
Report. 352: 108. https://doi.org/10.17895/ices.pub.7539.
Jerram, K., S. Hoy, and C. Wilkins. 2020. “Okeanos Explorer EX2000 EM304 Sea Acceptance
Testing.”
https://mac.unols.org/sites/mac.unols.org/files/EX2000_EM304_SAT_FINAL_v3_2020032
5_Redacted.pdf.
Joye, S. B. 2015. “Deepwater Horizon, 5 Years On.” Science. 349: 592–593.
https://doi.org/10.1126/science.aab4133.
Kloser, R.J., Ryan, T., Sakov, P., Williams, A., and Koslow, J.A.. 2002. “Species identification in
deep water using multiple acoustic frequencies.” Canadian Journal of Fisheries and
Aquatic Sciences. 59(6): 1065-1077. https://doi.org/10.1139/f02-076.
Korneliussen, R.L., N. Diner, E. Ona, L. Berger, and P.G. Fernandes. 2008. “Proposals for the
Collection of Multifrequency Acoustic Data.” ICES Journal of Marine Science. 65(6): 982–
994. https://doi.org/10.1093/icesjms/fsn052.

April 2024 96
Koslow, J. A., 2009. “The role of Acoustics in Ecosystem-Based Fishery Management.” ICES
Journal of Marine Science. 66(6): 966–973. https://doi.org/10.1093/icesjms/fsp082.
Ladroit, Y., P.C. Escobar-Flores, A.C. Schimel, and R.L. O’Driscoll. 2020. “ESP3: An Open-Source
Software for the Quantitative Processing of Hydro-Acoustic Data.” SoftwareX. 12: 100581.
https://doi.org/10.1016/j.softx.2020.100581.
Ladroit, Y., G. Lamarche, and A. Pallentin. 2018. “Seafloor Multibeam Backscatter Calibration
Experiment: Comparing 45°-tilted 38-kHz Split-Beam Echosounder and 30-kHz Multibeam
Data.” Marine Geophysical Research. 39: 41–53. https://doi.org/10.1007/s11001-017-
9340-5.
Lanzoni, C. and T. C. Weber. 2011. “A Method for Field Calibration of a Multibeam
Echosounder.” OCEANS'11 MTS/IEEE KONA, Waikoloa, HI, USA.
https://doi.org/10.23919/OCEANS.2011.6107075.
Lee, W. J. and V. Staneva. 2020. “Compact representation of temporal processes in
echosounder time series via matrix decomposition.” The Journal of the Acoustical Society
of America. 148(6): 3429-3442. https://doi.org/10.1121/10.0002670.
Lee, W. J., K. Nguyen, and V. Staneva. 2020. “Echopype: Enabling interoperability and scalability
in ocean sonar data analysis (v0.4.0).” https://zenodo.org/record/3907000#.Y8_lg3bMKUl.
Lurton, X. 2002. An Introduction to Underwater Acoustics: Principles and Applications.
Heidelberg, Springer Berlin. https://link.springer.com/book/9783540784807.
Macaulay, G. and H. Peña. 2018. “The SONAR-netCDF4 convention for sonar data, Version 1.0.”
ICES Cooperative Research Report. https://doi.org/10.17895/ices.pub.4392.
Malde, K., N.O. Handegard, L. Eikvil, and A.B. Salberg. 2020. “Machine intelligence and the data-
driven future of marine science.” ICES Journal of Marine Science. 77(4): 1274-1285.
https://doi.org/10.1093/icesjms/fsz057.
MAREC. n.d. “Home.” https://www.marec.no.
McConnaughey, R.A. and Syrjala, S.E. 2009. “Statistical relationships between the distributions
of groundfish and crabs in the eastern Bering Sea and processed returns from a single-
beam echosounder.” ICES Journal of Marine Science. 66(6): 1425-1432.
https://doi.org/10.1093/icesjms/fsp147.
Michaels, W.L., Handegard, N.O., Malde, K. & Hammersland-White, H. 2019. Machine Learning
to Improve Marine Science for the Sustainability of Living Ocean Resources: Report from
the 2019 Norway - U.S. Workshop. NOAA Tech. Memo. NMFS-F/SPO-199.
https://spo.nmfs.noaa.gov/sites/default/files/TMSPO199_0_0.pdf.
National Ocean Mapping, Exploration, and Characterization Council of the Ocean Science and
Technology Subcommittee and Ocean Policy (NOMEC). 2020. Implementation Plan for the
National Strategy for Ocean Mapping, Exploring, and Characterizing the United States
Exclusive Economic Zone Committee. https://trumpwhitehouse.archives.gov/wp-
content/uploads/2020/01/210107-FINAL-NOMEC-Implementation-Plan-Clean.pdf.
NOAA NCEI. 25 March 2021. “Understanding Our Ocean with Water-Column Sonar Data.”
https://storymaps.arcgis.com/stories/e245977def474bdba60952f30576908f?fbclid=IwAR
1mEflE1Nk5285GRiqMtYC70Q-4z4xNT8H6HuKhUnsbMgqelXPpht8Nu2I.
NOAA OER. 2020. NOAA OER Deepwater Exploration Mapping Procedures Manual.
https://doi.org/10.25923/jw71-ga98.

April 2024 97
Parker-Stetter, S.L., Rudstam, L.G., Sullivan, P.J., and Warner, D.M. 2009. Standard Operating
Procedures for Fisheries Acoustic Surveys in the Great Lakes. Great Lakes Fish. Comm.
Spec. Pub. 09-01. http://www.glfc.org/pubs/SpecialPubs/Sp09_1.pdf.
Peña, H., Macaulay, G. J., Ona, E., Vatnehol, S., and Holmin, A. J. 2021. “Estimating individual
fish school biomass using digital omnidirectional sonars, applied to mackerel and herring.”
ICES Journal of Marine Science. 78(3): 940-957. https://doi.org/10.1093/icesjms/fsaa237.
Peña, M. 2016. “Incrementing data quality of multi-frequency echograms using the Adaptive
Wiener Filter (AWF) denoising algorithm.” Deep-Sea Research I. 116: 14-21.
https://doi.org/10.1016/j.dsr.2016.07.008.
Proni, J. R., and J R. Apel. 1975. “On the Use of High-Frequency Acoustics for the Study of
Internal Waves and Microstructure.” Journal of Geophysical Research. 80(9): 1147-1151.
https://doi.org/10.1029/JC080i009p01147.
Quality Positioning Services (QPS). 2023. “Fledermaus: 4D geo-spatial analysis.”
https://www.qps.nl/fledermaus.
Ryan, T. E., Downie, R. A., Kloser, R. J., Keith, G. 2015. “Reducing bias due to noise and
attenuation in open-ocean echo integration data.” ICES Journal of Marine Science. 72(8):
2482-2493. https://doi.org/10.1093/icesjms/fsv121.
Rice, G. and Greenaway, S. 2017. “NOAA SHIP FAIRWEATHER Launch 2805, 2806, 2807, AND
2808 EM2040 Acceptance Testing.”
https://mac.unols.org/sites/mac.unols.org/files/Fairweather_Launch_EM2040_Acceptanc
e.pdf.
Sarr, J.M.A., Brochier, T., Brehmer, P., Perrot, Y., Bah, A., Sarré, A., Jeyid, M.A., Sidibeh, M. and
El Ayoubi, S., 2021. “Complex data labeling with deep learning methods: Lessons from
fisheries acoustics.” ISA transactions. 109: 113-125.
https://doi.org/10.1016/j.isatra.2020.09.018.
Skarke, A., Ruppel, C., Kodis, M. et al. 2014. “Widespread methane leakage from the seafloor on
the northern US Atlantic margin.” Nature Geoscience. 7: 657–66.
https://doi.org/10.1038/ngeo2232.
Stienessen, S., N. Lauffenburger, and A. De Robertis. 2019. “Results of the acoustic-trawl
surveys of walleye pollock (Gadus chalcogrammus) in the Gulf of Alaska, February-March
2018 (DY2018-01 and DY2018-03).” NOAA, National Marine Fisheries Service.
https://doi.org/10.25923/rt3f-b427.
Stranne, C., Mayer, L., Weber, T.C., Ruddick, B.R., Jakobsson, M., Jerram, K., Weidner, E.,
Nilsson, J. and Gårdfeldt, K. 2017. “Acoustic mapping of thermohaline staircases in the
Arctic Ocean.” Scientific Reports, 7(1): 1-9. https://doi.org/10.1038/s41598-017-15486-3.
Stranne, C., Mayer, L., Jakobsson, M., Weidner, E., Jerram, K., Weber, T.C., Anderson, L.G.,
Nilsson, J., Björk, G. and Gårdfeldt, K., 2018. “Acoustic mapping of mixed layer depth.”
Ocean Science. 14(3): 503-514. https://doi.org/10.5194/os-14-503-2018.
Tournier, Martin, Goulet, Pauline, Fonvieille, Nadège, Nerini, David, Johnson, Mark, and
Christophe Guinet. 2021. “A novel animal-borne miniature echosounder to observe the
distribution and migration patterns of intermediate trophic levels in the Southern Ocean.”
Journal of Marine Systems. https://doi.org/10.1016/j.jmarsys.2021.103608.
April 2024 98
Trenkel, V. M., Mazauric, V. and L. Berger. 2008. “The new fisheries multibeam echosounder
ME70: description and expected contribution to fisheries research.” ICES Journal of Marine
Science. 65:645-655. https://doi.org/10.1093/icesjms/fsn051.
Watkins, J. and J.L. Worzel. 1978. “The serendipity gas seep area, south Texas offshore.”
American Association of Petroleum Geologists Bulletin. 62: 1067-1074.
https://doi.org/10.1306/C1EA4F95-16C9-11D7-8645000102C1865D.
Webb, T. J., Berghe, E. V., & Odor, R. 2010. “Biodiversity’s Big Wet Secret: The Global
Distribution of Marine Biological Records Reveals Chronic Under-Exploration of the Deep
Pelagic Ocean.” PLoS ONE. 5(8). https://doi.org/10.1371/journal.pone.0010223.
Weber, T. C., Jerram K., & Mayer L. 2012. “Acoustic sensing of gas seeps in the deep ocean with
split-beam echosounders.” Proceedings of Meetings on Acoustics. 17, 070057.
https://doi.org/10.1121/1.4772948.
Yue, H., Zhang, L., Wang, D., Wang, Y. and Lu, Z., 2017. “The classification of underwater
acoustic targets based on deep learning methods.” 2nd International Conference on
Control, Automation and Artificial Intelligence. Atlantis Press.
https://dx.doi.org/10.2991/caai-17.2017.118.

April 2024 99
Chapter 5: Side Scan Sonar
Chris Gardner, NOAA
Martha Herzog, NOAA
Steven Intelmann, NOAA
Monique LaFrance Bartley, NPS
James J. Miller, NOAA
Jennifer Miller, BOEM
Paul Turner, NOAA
Matthew Wilson, NOAA
5.1 Introduction
SSS are acoustic instruments that transmit two narrow, fan-shaped beams in a wide track on both
sides of a path (Figure 5.1). The beams radiate from the sonar’s transducers to the seafloor; the
transducers also record the returns as a series of backscatter vs. time measurements. The sound
is absorbed, reflected, and scattered to various degrees, depending on the seafloor’s geological,
geomorphic, and biological characteristics and anthropogenic features (e.g., shipwrecks,
obstructions). For example, soft sediment environments absorb more sound than coarse
sediment and rocky environments, coral reefs and shellfish beds, and shipwrecks, all of which
tend to reflect sound. The unique acoustic pattern indicative of a given seafloor feature is
referred to as its “acoustic signature” and allows for the side scan data to be interpreted. The
relief of seafloor features is calculated by measuring the shadow height in the side scan record.
SSS can be towed at depth behind a vessel or operated from AUVs at a fixed altitude above the
seafloor (Figure 5.2). Hull mounted SSS are also used, generally in shallower water.
SSS data have broad applicability, and surveys are conducted to meet project goals that range
from seafloor characterization (e.g., benthic habitats, sediment, geologic and geomorphic
features) to supplementing hydrographic surveys to meet object detection requirements (e.g.,
used in the region between regular MBES sounding lines for the additional indication of dangers
and bathymetric irregularities).
This chapter focuses on collecting, processing, and delivering SSS data and will summarize best
practices for acquisition standards and system set-up, range scales, frequencies and ping rates,
coverage requirements, positioning, system calibration, QA/QC techniques, and how to derive
products. This chapter provides overarching guidance and recommendations and will not address
manufacturer-specific recommendations or recommendations concerning specific use cases.
5.1.1 Data Management
Management of SSS data is necessary for efficient use, future access, and validation of analytical
and interpretative results. Record SSS raw data files in the instrument’s vendor-specific format.
Common file formats include, but are not limited to .xtf, .jsf., .hsx, and .gcf. Archive the raw and
processed data (i.e., mosaics) to ensure data are preserved to the fullest extent.
For specific details and guidelines associated with minimum SSS data requirements and
management (recommended file formats, metadata, data archival, etc.), see Chapter 1.6.4.

April 2024 100
5.1.2 Raw Data Acquisition
Below is essential information to be confirmed in data files and/or survey reports to increase
usability:
• Sonar settings
o Operational frequency (report both frequencies if using a dual frequency
system)
• Attitude and positioning
o Specifications of the navigation system(s)
o Accuracy
o Installation information
▪ Linear and angular offsets for installation on surface vessels or
underwater vehicles
▪ Towfish configuration and winch/cable information, if towed
Figure 5.1. Schematic of a towed system: towed system and sonar beams (top) and data visualization
(bottom) in which lines of data are interpreted as a “waterfall” image. Image courtesy of USGS.
April 2024 101
• Spatial reference
▪ Coordinate system and horizontal datum references for raw
echosounder data and navigation system, if different
o Options as stated in Lurton and Lamarche (2015):
▪ No geo‐reference
▪ Geographic reference (lat, long)
▪ Projected reference (Mercator, UTM, other projected reference)
▪ Other
5.1.3 Data Processing and Mosaic Generation
Below is essential information to be confirmed in data files and/or survey reports to increase
usability:
• Processing steps
o Describe data processing steps
o Note application of gains (e.g., TVG, angular varying gain [AVG]), lookup tables
(LUT), etc. to correct for water column returns, arrival angle, and refine
contrast to produce a color-balanced image
o Documentation of targets identified, if processed and available
• Spatial reference
o Coordinate system and horizontal datum
o Describe processing used to shift coordinate system or datum, if different from
raw data
o Options as stated in Lurton and Lamarche (2015):
▪ No geo‐reference
▪ Geographic reference (lat, long)
▪ Projected reference (Mercator, UTM, other projected reference)
▪ Other
• Mosaicking settings
o Order (top, bottom)
o Statistical (average)
• Visual representation
o Examples: Greyscale 0‐255, gold scale 0-255, inverse gold scale 0-255

April 2024 102
5.2 Target Detection
The specific settings used to acquire and process side scan data differ depending on project goals
and the equipment and software used. It is recognized that defining a set of standard best
protocols for the mapping community to follow is challenging. Instead, this chapter directs SSS
operators and data processors to operate in such a manner that the data can detect a target (i.e.,
object or feature) of a particular dimension on the seafloor. In water depths less than or equal to
20 m, a target that measures 1 m x 1 m x 1 m (with the height measured from shadow length)
should be detectable. In water depths greater than 20 m, a target should be detectable with a
height (measured from shadow length) of at least 5% of the depth. The settings, software, and
equipment needed to achieve these target detection standards are for the user to determine.
When a target is correlated to multibeam data acquired concurrently with SSS operations,
determine the shallowest depth of the target from the multibeam data. Determine the
shallowest depth measurement from a beam within 30 degrees of nadir unless multiple passes
were made over the target. If the correlating sounding is sourced from one of the outer beams
of the multibeam system, investigate the target further.
Figure 5.2. Side scan sonar examples: side scan towfish, typical towed deployment, raw
sonar backscatter, and photograph of limestone reef at location of side scan imagery.
Images courtesy of NOAA Fisheries.

April 2024 103
5.3 Coverage Requirements
SSS data coverage needs and range scale will vary based on specific program, project goals, and
equipment used. Coverage refers to the extent to which SSS swaths ensonify the seafloor with a
received detection—i.e., the band of the sea bottom that is ensonified and recorded along a
single vessel track line to the detection (e.g., -3 dB) limits. Range scale is the width of the seafloor
ensonified on each side of the SSS towfish along a single vessel track line. The recommended
percent of ensonified seafloor coverage is 125% or greater with 10% or greater overlap between
each vessel trackline. This recommendation balances the desire for the seafloor to be fully
ensonified (i.e., 100% coverage) and survey efficiency/wise expenditure of resources (i.e.,
minimal survey effort to achieve project goals). Note: If the project purpose is for navigation or
object detection, then 125% coverage may not be adequate; refer to the NOAA Hydrographic
Survey Specifications and Deliverables for additional guidance (NOAA OCS, n.d.).
5.4 Spatial Referencing
Survey coverage data should be provided as a geospatial dataset (e.g., .shp, .gdb) that includes
the polygon feature class(es) of the location of the study site(s) surveyed and the line feature
class(es) of the navigational cruise track lines of the survey vessel. If there is more than one study
site, provide cruise track lines as a separate feature class per study site. Merge track line files to
Figure 5.3. Side scan data collection: collection results over artificial reefs (military tanks). Image
courtesy of Florida Fish and Wildlife Research Institute.

April 2024 104
produce a single feature class if multiple line files were recorded for a given study site (e.g., based
on the survey date, a subsection of the larger study site, or individual track lines).
Geospatial data should be georeferenced to the most current horizontal datum from the National
Spatial Reference System. Projection information must be defined in the feature class so that the
data project accurately when imported into GIS.
Geographic data must use the most recent adjustment and epoch of the North American Datum
(NAD) of 1983 (currently NAD83(2011), Epoch 2010.00) in either UTM (eastings/northings) with
the zone specified or as geographic coordinates (latitude/longitude) and adequately
documented. Note: Both horizontal and vertical datums will be replaced by the North American
Terrestrial Reference Frame of 2022 (NATRF2022), based on GPS/GNSS and a GRAV-D-based
geoid (GEOID2022) (NOAA NGS, n.d.).
5.5 General Side Scan Data Acquisition Parameters
The following are standard acquisition parameters to use as a reference for guidance. Use specific
settings to meet the target detection criteria defined above.
5.5.1 Frequency
Signal frequency varies across sonar systems, typically between 100 and 500 kHz for systems
intended for object detection and seafloor characterization. There is a trade-off between lower
and higher frequency systems: lower frequencies offer increased maximum range scale (or swath
width), whereas higher frequencies offer increased image fidelity and resolution.
5.5.2 Navigation/Positional Uncertainty/Accuracy
At a minimum, utilize a position and attitude system with one or more GNSS receivers and an
IMU during a survey. A GNSS receiver acquires the vessel’s position using GNSS satellites (i.e.,
GPS), and when using multiple receivers, it also provides heading information. Use the exact
GNSS clock signal for positioning as the timing signal for the entire survey system. The IMU
measures vessel attitude (i.e., roll, pitch, yaw, and heave) across all axes and rotations. These
data, in conjunction with the positioning data and sound speed, allow data to be corrected to its
true position on the seafloor. In integrated systems, the data from the IMU allows the vessel to
maintain an accurate position, even in the event of a total loss of GNSS satellites for short
durations such as operating under a bridge or other obstructions.
Horizontal accuracy will depend on the system configuration, investigation technique, water
depth, and target density. However, the position of targets identified with side scan imagery must
be sufficiently accurate to relocate the feature.

April 2024 105
5.5.3 Survey Speed
Data collection speed should be such that an object 1 m x 1 m x 1 m would be independently
ensonified a minimum of three times per pass. Typical survey speeds are 3-6 knots, though it
could be faster, as survey equipment and conditions permit.
5.5.4 Horizontal Range
The achievable horizontal range of a SSS is a function of several parameters, including the sonar
system’s characteristics and tow/mount configuration, range scale in use, seafloor composition,
and environmental factors (e.g., sea state, inclement weather, water column). If the effective
range scale of the SSS is reduced due to external factors, then the range scale should be reduced
accordingly to meet the target detection criteria and data coverage needs. For example,
environmental changes may distort the outer half of the 100 m range scale. In this case, only 50
m of effective range could be claimed.
5.6 System Configuration
5.6.1 Towed System
A towed sonar system configuration can significantly reduce the effects of vessel motion and
allow for adjustment of the operating height of the towfish (Figure 5.2) above the seafloor to
enable the optimum shadow, both of which improve data quality and resolution. However, the
disadvantage of towed configurations is that they introduce uncertainty regarding the position
of the towfish. This error has three components:
● An along-track component caused by uncertainty in how far the towfish is astern of the
vessel. This error depends on the length of cable out, depth of towfish, and vertical
catenary of the cable (the last two also vary with the ship’s speed);
● An across-track component, caused by deflection of the towfish by the tidal stream or
current and by ship maneuvers;
● Errors in the position of the ship or boat transferred to the towfish.
For towed sonar systems, measure static vessel offsets to the tow point. Calculate the actual
towfish position using towfish depth and cable-out measurements. Determine towfish depth by
a depth sensor installed in the towfish or calculated by subtracting the towfish height
(determined by a separate echosounder installed in the towfish or the first return of each sonar
ping) from the depth of water (determined from a vessel echosounder). If the sonar is equipped
with a pressure sensor, test its accuracy annually and whenever the horizontal positioning
accuracy of side scan targets is in doubt.
Cable out can be estimated visually from calibrated markings on the cable or measured with an
electronic cable counter. Note: When measuring cable out, the cable zero mark is not at its
connection to the towfish but the phase center of the sonar.

April 2024 106
For most SSS operations, the optimum height of the towfish above the seafloor is 8% to 20% of
the range scale in use. For any towfish height below 8% of the range scale in use, the effective
scanning range is defined to equal 12.5 times the towfish height, provided adequate echoes have
been received. During shallow water operations, the towfish may need to be flown very close to
the surface with little tow-cable out which may introduce noise in the data from surface waves,
and ship wake, and additional survey lines may need to be run to ensure coverage requirements
are met. When the towfish height has exceeded 20% of the range scale, carefully examine the
data, as targets will display reduced shadow length to height.
In sufficiently shallow survey areas (perhaps <500 m), a USBL system can be used to more
accurately position the towfish. Properly installed, calibrated, and processed USBL data can
provide more accurate positioning than a simple cable-out determination of layback. In practice,
USBL systems calculate the subsurface position of an object by combining acoustic range and
bearing data from a vessel-mounted transceiver with attitude, heading, and location information
from the vessel’s navigation system. The tracked object is equipped with an acoustic transponder
or responder that communicates with the transceiver attached to the vessel. This technology
does not require a transponder array to be deployed on the seafloor before positioning can
commence and is thus ideal for trackline surveys. The transceiver can be affixed to the vessel’s
hull or on a stable over-the-side pole with no inherent wobble at survey speed. Hull-mounted
configurations require the transceiver to sit well below the vessel to avoid interference and
multipath conditions. In nearly all cases, the calculated XYZ acoustic positions will require some
degree of post-process smoothing before reinsertion into the raw sonar navigation packets
before mosaicking.
5.6.2 Vessel-Mounted System
Hull-mounted or pole-mounted (bow or side) sonar system configurations allow for the position
and orientation of the sonar to be accurately known, improving the positioning of detected
features in the SSS data. Mounted systems are preferred in shallow waters or areas with potential
or known hazards that pose challenges to surveying with a towed system. For example, mounted
systems reduce the risk of entanglement in fishing gear and making contact with obstructions
(e.g., boulders, wrecks). Mounted systems also increase the freedom of maneuverability of the
survey vessel. Pole-mounted systems provide the benefit of adjustable and repeatable survey
operations, and the systems are quick to set up. Pole-mounted systems are beneficial for mobile
or ‘fly-away’ system configurations.
Position data for hull or pole-mounted SSS systems are typically more accurate than a towed SSS
system configuration, and operations in shallow waters can be conducted with less risk and
increased safety and efficiency compared to towed systems. Range scale requirements for this
configuration are based on a factor of water depth with the towfish height above the bottom to
be 8%–20% towfish height of the operating range scale.
However, mounted configurations may introduce additional vessel motion effects on the data
and potential interference from other vessel-mounted sensors. This method also may limit the

April 2024 107
operational extent of a given sonar system since it is attached to the vessel and unable to be
operated at the optimum height above the seafloor.
For hull-mounted systems, position the sonar’s phase center of the SSS during the vessel static
offsets survey. The phase center of the sonar is considered to be at the fore and aft midpoint of
the transducer and on the centerline in the athwart ship and vertical axes.
For pole-mounted systems, measure and confirm offsets annually. Use the benchmark closest to
the pole mount as a reference point. The X, Y, and Z should be measured from the vessel’s
reference point. Some pole-mounted systems do not require traditional offset measurements
because of their “plug and play” ability. In these setups, the antennas, IMU, and sonar are all
integrated into the single boat setup, making the measurements of the vessel negligible.
5.6.3 Documenting System Configuration
Measure and/or verify SSS system offsets before calibration. Depending upon whether the sonar
configuration is hull-mounted or towed, requirements for offset measurements will vary.
At a minimum, vessel configuration and offset information should be presented as a text file (e.g.,
ASCII) or spreadsheet (e.g., .csv, .xlsx) AND a schematic file (e.g., .jpg, .bmp., .tiff). The files should
contain details of survey vessel dimensions (length, width, draft) and offsets of survey
instruments. Provide multiple files if using more than one vessel or configuration.
5.7 System Calibration
The SSS calibration test should consist of multiple passes (e.g., 10) on a known target. Image the
target from various ranges and directions with survey speed, water depth, and weather
representative of typical survey conditions. When possible and/or necessary to meet project
goals, use an alternate system (e.g., MBES) to determine a high-accuracy absolute position of the
target for comparison with SSS detected positions. Conduct this test across all range scales
intended to be used for data acquisition.
Successful object detections should be used to compare the mean detected position with the
absolute target position and to compute the approximate 95% confidence radius for the system.
This radius should not exceed 5 meters for hull-mounted systems and 10 meters for towed
systems.
Line plans are recommended for conducting a SSS calibration test (Figure 5.4). The recommended
plan balances ensonifications on the port and starboard channels, across the range scale, from
different target aspects, and from different directions, assisting the hydrographer in
differentiating systematic and random errors in detection and positioning.

April 2024 108
5.8 Quality Control
5.8.1 Quality Assurance and Confidence Checks
Conduct confidence checks of the SSS system prior to a survey and at least once daily during a
survey. Accompany these checks at the outer limits of the range scales being used based on a
target near or on the bottom. Check each sonar channel (i.e., port and starboard channels) to
verify proper system tuning and operation. Confidence checks can be made on any discrete
object, offshore structure, or bottom feature convenient or incidental to the survey area. Targets
can include wrecks, offshore structures, navigation buoy moorings, distinct trawl scours, or sand
ripples. If a convenient or incidental target is unavailable, place a known target on or near the
bottom and use it for confidence checks.
Make confidence checks during survey operations by noting the check target on the sonogram.
Confidence checks are an integral part of the daily SSS operation and should be annotated,
including the time of check, in the SSS acquisition and processing logs.
When an area is ensonified multiple times, examine and correlate targets between successive
SSS coverages (i.e., compare the first 100% with the second 100% sonar coverage) or MBES data.
Figure 5.4. Side scan sonar calibration line plan: recommended line plan for SSS calibration testing.
Image courtesy of NOAA Office of Coast Survey.

April 2024 109
Anomalous targets which appear consistently and correlate in each data record provide
increased confidence that the acquisition system(s) is(are) working correctly and help to confirm
the existence of these targets.
Before surveying with an SSS system that has been reconfigured or stored, perform a rub test.
The test consists of manually rubbing each transducer on the towfish while the system is pinging
and confirming the observed side scan return signal in the incoming data stream. A rub test
failure indicates system errors such as incorrect gain or power settings, a faulty cable, or damaged
transducers. Conduct this test swiftly while the towfish is out of the water and dry to avoid the
possibility of electric shock. While testing, avoid running the system for an extended period while
out of the water.
5.8.2 Environmental Influences
Environmental influences can impact the SSS record, including density differences between
water masses, water mass separation and mixing due to tidal flows, surface mirroring (Lloyd
Mirror Effect), and water column interference due to entrained air bubbles (e.g., from passing
vessel prop wash or wave action), suspended sediment, and fish and other biologic organisms.
These influences interfere with seafloor detection and affect the return signal, causing refraction
and distortion in outer swath regions and degrading data quality.
In areas that experience a strong thermocline, sonar operators will need to lower the towfish
below the thermocline so the SSS signal does not pass through the dense thermocline layer. Sea
state can also influence data collection and quality, especially for hull-mounted and pole-
mounted systems operating in surface waters where air bubbles become entrained from wave
action.
SSS records that include environmental influences affecting any portion of the swath and hinder
the selection of contacts in the affected regions do not meet the requirement of 100% complete
coverage. In such cases, reduce the swath range and reject the affected areas. Data should be
reacquired to meet the complete coverage requirement.
5.8.3 Operational Considerations
It is good practice to tow the sonar parallel to the contours in areas characterized by relatively
low gradients. However, when surveying in terrain with steep walls or submarine canyons, higher
quality data are achieved by “flying” the towfish in a downslope direction to avoid the effect of
achieving no acoustic return from the deep-side channel where the signal propagation may not
reach the seafloor to elicit a return echo.
April 2024 110
5.9 Data Products
5.9.1 Mosaics
SSS data are compiled into mosaics of georeferenced sonar imagery (Figure 5.5). These products
are often incorporated into GIS for analysis and visualization. Follow these mosaic protocols to
enable the greatest use of the data:
• A single georeferenced raster file for each area of coverage in floating point GeoTIFF
format or other standard image file format (e.g., JPEG2000).
• The projection information must be defined in the image (e.g., .GeoTIFF) or in an
associated file (e.g., .tif with accompanying .twf file) so that the data project
accurately when imported into GIS.
• SSS data should be presented as a continuous and comprehensive “map view” by
“stitching” together adjacent individual track lines of processed data.
• Merge overlapping data to produce the best visual display; options include averaging
and ordering by timestamp.
• Visual data products should use a color scheme standard in the industry (e.g.,
grayscale, inverse grayscale, gold scale).
• Tile mosaics, if necessary (e.g., for large study sites), to reduce file size and improve
the visual layout of maps.
• SSS mosaics and waterfall images should represent data that have been processed to
remove the central nadir region and at a color scale that enhances feature
identification.

April 2024 111
5.10 Other Resources
SOPs have been developed for SSS operations, and some example protocols and websites with
further guidance are listed below:
• NOAA Hydrographic Survey Specifications and Deliverables (NOAA OCS, n.d.)
• NOAA Field Procedures Manual (NOAA OCS, n.d.)
• IHO S-44 Chapter 4 Seafloor Classification (IHO, n.d.)
• Procedures and Criteria for Evaluating Benthic Mapping Data (LaFrance et al., 2019)
Figure 5.5. Geotiff mosaic of side scan sonar data collected with an AUV mounted system: imagery
depicts several low-relief rocky reefs, a limestone ledge, and adjacent sand habitats. Image courtesy
of NOAA Fisheries.

April 2024 112
5.11 References
IHO. n.d. “Chapter 4: Seafloor Classification and Feature Detection.”
https://iho.int/uploads/user/pubs/cb/c-13/english/C-13_Chapter_4.pdf.
LaFrance Bartley, M., T. Curdts, and S. Stevens. 2019. Procedures and Criteria for Evaluating
Benthic Mapping Data: A Northeast Coastal and Barrier Network Methods Document.
Natural Resource Report NPS/NCBN/NRR—2019/2050. National Park Service, Fort Collins,
Colorado. https://irma.nps.gov/DataStore/DownloadFile/633175.
Lurton, X. and G. Lamarche. 2015. Backscatter Measurements by Seafloor‐Mapping Sonars:
Guidelines and Recommendations. https://geohab.org/wp-
content/uploads/2018/09/BWSG-REPORT-MAY2015.pdf.
NOAA NGS. n.d. “New Datums.” National Geodetic Survey.
https://www.ngs.noaa.gov/datums/newdatums/index.shtml
NOAA OCS. n.d. “Standards and Requirements.”
https://nauticalcharts.noaa.gov/publications/standards-and-requirements.html.
April 2024 113
Chapter 6: Sub-bottom Profiling
Jeff Danielson, USGS
Chris DuFore, BOEM
Jim Flocks, USGS
Arnell Forde, USGS
Dave Foster, USGS
Jenna Hill, USGS
Jennifer Miller, BOEM
Jeff Waldner, BOEM
6.1 Introduction
Sub-bottom (subseafloor) profiles are acquired using seismic-reflection techniques that provide
a continuous vertical two-dimensional (2D) stratigraphic display along the survey ship’s track.
Interpretation and analysis of these profiles are used to map shallow (generally less than 200 m)
stratigraphic and morphologic features. Sub-bottom systems use an acoustic source to transmit
a sound wave directed downward. These systems work the same as bathymetric sensors but are
of lower frequency so that the signal penetrates the seafloor, where it responds to density or
sound speed changes in the sub-bottom structure through an acoustic impedance. The acoustic
impedance (z) of a material is defined by the product of sound speed and density of the material.
Some of the transmitted acoustic waves reflect where there is a contrast acoustic impedance
(e.g., the contact between the water column and seafloor). Some of the transmitted waves
propagate through the seafloor and sediment. The depth of penetration of the acoustic energy
below the seafloor and the sub-bottom depends on the power and frequency of the acoustic
source and the acoustic impedance of the substrate. Seafloor and sub-bottom reflections are
received either by the acoustic source (transducer) or a separate receiver (hydrophone) and
recorded digitally as amplitude and source to receiver time (two-way travel time). Reflectivity
and timing of the return signal are processed through topside hardware to produce a vertical, 2D
profile of the subsurface physical environment as a series of amplitude changes over time and
distance. Numerous publications describe 2D seismic data acquisition in the marine environment
in detail (e.g., Dondurur, 2018).
This chapter describes SOPs for using one receiver (single-channel seismic [SCS]) within frequency
bandwidths ranging from 0.2 kHz to 24 kHz. Sub-bottom systems can have a separate source and
receiver, or the source can also act as a receiver (transducer). The term sub-bottom often refers
to systems where the source and receiver are a single component, or the source and receiver are
both contained within a tow vehicle. In this chapter, we also use the term sub-bottom to describe
systems with sources and receivers that are towed separately. These acoustic sources are often
referred to as high-resolution geophysical (HRG) sources, typically used in shallow subseafloor
imaging and have lower power and higher frequencies than implosive type systems (airguns).
Airguns are more typically used with multichannel seismic (MCS) systems, which have multiple
receivers offset by distance from acoustic sources. MCS systems are not addressed in this chapter
due to the complexity of acquisition, processing, and survey-specific design. However, much of
the SOP for SCS applies to MCS systems. Boomer and sparker sound sources are increasingly
paired with multichannel streamers for very high-resolution continental shelf surveys, for
example, 32 channels (groups) with group spacing as short as 1.5625 m. Many MCS systems

April 2024 114
processing methods apply to SCS processing, but there are many more methods available in MCS
system processing primarily due to having multiple sources to receiver offsets for each shot.
This SOMP also does not describe the principles of seismic reflection or system design, instead,
it focuses on common system types, practical survey design, conventional acquisition
procedures, processing protocols, data formats, and publication.
Sub-bottom and seismic reflection systems are generally identified by the source/receiver
configuration and by the method of the acoustic pulse. Systems use displacement to propagate
a wave through the water (boomer, Bubble Gun, airgun), generate controlled broadband swept
frequency waveform (chirp), or create an explosion (sparker) or implosion (water gun) in the
water column (Mosher and Simpkin, 1999). Seismic reflection systems have separate towed
sources and receivers. Boomer, Bubble Gun, and sparker systems imply having a separate
receiver as part of the system. Sub-bottom systems have the source and receiver contained in
the same tow-body (e.g., chirp systems) or have transducers that function as source and receiver,
such as hull-mounted systems. Figure 6.1 shows examples of seismic-reflection profiles from
various systems collected over the same terrain in Tampa Bay, Florida, U.S.A. The examples show
the differences in signal penetration depth and vertical resolution. The comparisons are
qualitative, as each system has different source configurations that can produce different
imaging results.
This chapter provides overarching guidance and recommendations for the collection of mapping
data from the sub-bottom and will not address manufacturer-specific recommendations or
recommendations concerning specific use cases.

April 2024 115
Figure 6.1. A qualitative comparison of seismic-reflection profiles: the profiles were acquired using
(a) bubble pulse plate; (b) boomer plate; (c) sparker, and; (d) chirp systems. The profiles cover the
same terrain and arrows A-D point to the same geologic features in the subsurface. The uppermost
reflector (seafloor) is also shown. Comparison of the profiles demonstrate the different penetration
capability and vertical resolution between the systems.
April 2024 116
6.2 Cruise Planning and Coordination
Data acquisition strategies usually include multi-tool systems, such as sub-bottom, seismic, SSS,
and bathymetric systems to provide for efficient and affordable data acquisition. Prior to a
geophysical investigation, communicate with stakeholders regarding collaboration and
leveraging of assets. Collaboration can increase the field of study, reduce cost, and develop future
endeavors.
With several useful technologies to deploy to complement the sub-bottom, acquire single beam
bathymetry simultaneously as close to the seismic source as possible to provide accurate seafloor
corrections during post-processing. Deep-towed sub-bottom systems should have a pressure
sensor to record vehicle depth so the total water column depth can be determined. Water
column depth is defined as depth from the sea surface to the seafloor. A GPS, independent of
the ship navigation, is necessary for spatial control, and the offset between the GPS receiver and
the acoustic source should be measured (e.g., layback) before the survey. Water depth and
positioning can be recorded within the seismic file header fields and/or independently. Data
acquisition and spatial integration are performed at the topside unit using specially designed
software. This software also calculates layback, which can be applied in post-processing. Offset
corrections may not be necessary when the GPS antenna is fixed to a surface-towed system. The
effectiveness of seismic data in accurate sub-bottom imaging is improved through ground
truthing, sediment cores, or other investigative techniques (e.g., well logs) to validate the
acoustic response of the stratigraphy. Cruise planning should consider existing core or log
locations, or existing subsequent ground truthing. “Ground truthing” is verifying through direct
measurements or sample collection that what is in a particular location. For example, if there
may be seagrass on the seafloor at location X, conduct a benthic survey to take images and
confirm whether the assumption is correct.
Survey platforms are optimized for navigation conditions and project budget constraints. Large
vessels are desirable for open ocean surveys because they can accommodate 24-hour operations
and accommodations for multiple watch crews. Smaller, day-boat operations are utilized for
nearshore, shallow-water, and inland water areas. Autonomous vehicles can be used in a variety
of conditions. Regardless of the environment, design survey lines as straight as possible. The lines
should be segmented to accommodate turns, obstructions, or shoreline features. Typically, the
survey strategy consists of parallel lines (tracklines) with the spacing between lines determined
by the desired stratigraphic resolution. These parallel tracklines must be crossed by tielines so
there is a continuous sampling of the stratigraphy between lines that generates a typical survey
grid pattern. Maintain consistent vessel speed along lines. Typical survey speed is 3–6 knots,
depending on equipment type and oceanographic conditions, including current and waves.
Towed systems are sensitive to wave conditions, and the quality of data can be compromised by
adverse sea states. Rough sea conditions should be avoided for this type of survey. Waves can be
accommodated somewhat by designing a survey into or with the wave direction; mitigate swells
in the seismic record through post-processing.
Complete logging of the system configuration, weather and sea state, crew, file/line
identification, data acquisition parameters, and equipment status is critical. This process begins

April 2024 117
before and throughout the survey, with descriptions of project intent, survey strategy, vessel and
equipment, location, dates of acquisition, and point-of-contact entered into a central database
or whatever media is available. This preserves cruise information for perpetuity and is the
beginning of metadata development. As discussed in Chapter 1, if the data are to be archived in
a global repository, the cruise information should align with the protocols of the repository (see
NCEI for general use standards [NOAA NCEI, n.d. e.]). Additional guidance is provided in the
Chapter 1.6.5.
6.3 Navigation
Accurate positioning of seismic data requires horizontal traces positioned with high precision.
The ping, or shot, of the source is annotated with a geographic position, which is included in the
trace header and/or external navigation file (along with any datum information). In older data
that predates GPS positioning, interpolation between navigational fixes was required. Modern
systems use DGPS with a high sampling rate to reduce interpolation. In coastal surveys, deploying
RTK transmitters improves resolution. As described in the following sub-bottom chapters,
accurate layback measurements are necessary since the position is extrapolated from the DGPS
antennas to the source and receiver positions. For surface-towed systems, mount a DGPS
antennae directly on the source sled, with an FM transmitter to relay position back to the top-
side processor.
6.4 System Types
Sub-bottom systems are defined by their sound source and source/receiver configuration.
Depending on the application or goals of the survey, one system may be advantageous over
another. Each system produces different power levels and frequency ranges. The following
subchapters discuss the advantages of each system. See Mosher and Simpkin (1999) for examples
of the system types. Chirp systems have the source and receiver in the same body or use the
same transducer to transmit and receive. The chirp sound-pulse is spread across a user-specified
bandwidth and pulse length. Other seismic reflection systems (e.g., boomer, sparker) separately
tow source and streamer (receivers) and emit a broadband sound pulse that is centered around
a peak frequency. Deep-towed boomer and sparker systems with attached single-channel
streamers are less common than surface-towed systems. This chapter describes these systems.
6.4.1 Chirp
A chirp SBP is a hull-mounted or towed acoustic system that emits a frequency-modulated, or
swept-frequency, pulse across a bandwidth generally between 0.5–24 kHz. Other configurations
exist, but typical systems are configured to operate with bandwidths of 0.5–12 kHz, 2–16 kHz,
and 4–24 kHz. The outgoing pulse of these systems can have various bandwidths and pulse
lengths. The source signature is highly repeatable (Gutowski et al., 2002); as such, an advantage
of chirp signal processing over single channel systems is that the signal is phase and amplitude-
compensated in real time to filter out (match filter) the outgoing sonar component. This signal
processing theoretically results in an artifact-free return signal representing the subsurface
April 2024 118
component’s acoustic impedance (Schock et al., 1989). The resolution of chirp systems is the 10-
centimeter range (Gutowski et al., 2002), with a maximum penetration of 75–100 meters
depending on the lithology. The signal’s sampling frequency is around 20-25 kHz and, with a
typical vessel speed of ~4 knots, the horizontal trace interval is about 1 meter in shallow water.
The return signal is a full waveform and contains the sinusoidal phase of the analytic signal (see
Henkhart [2006] and Quinn et al. [1998] for examples). The chirp signal can be visualized with no
phase information; just the instantaneous amplitude, or envelope signal, is displayed (Henkhart,
2006). The envelope record improves the contrast of the signal but removes phase information.
Some systems retain the whole waveform of the signal and can be processed further to provide
a higher resolution image of fine-scale features in the subsurface (Saustrup et al., 2019;
Baradello, 2014). Where possible, the full waveform, or analytic signal, should be extracted from
proprietary formats and archived in the SEG-Y file format (see below). Collect and record raw
sub-bottom data files by vendor-specific systems and save in proprietary formats. Convert the
chirp envelope record to the SEG-Y file format during acquisition, and record the whole waveform
and envelope traces in SEG-Y. Proprietary formats, such as EdgeTech’s native JSF file format,
stores both the analytic and envelope signals (EdgeTech, 2022).
6.4.2 Boomers (Including the Bubble Gun, or Bubble Pulser Variant)
Boomer systems utilize an electromagnetic source that takes an electrical discharge from a ship-
based power supply to cause a circular plate to rapidly repel from a fixed flat spiral coil,
generating an acoustic pulse with a frequency bandwidth of 0.2–6 kHz. Peak frequencies are on
the order of 1 kHz (lower for Bubble Guns). A Bubble Gun operates similarly to a boomer plate,
generating an impulse by rapidly compressing a fixed volume of air. Boomer and Bubble Gun
plates are mounted on towed surface sleds and boomer plates can be mounted on a submerged
tow body. Surface sleds are configured with 1 or 2–3 plates. Multiple plate configurations
increase SL and directivity and are more commonly used with multichannel systems. Power
inputs are set between 100–350 J/plate. Boomers and Bubble Guns produce an acoustic signal
(fires) approximately every 0.5–1 s. They are often deployed with other higher frequency (higher
resolution) chirp systems to provide deeper sub-bottom penetration.
6.4.3 Sparkers
Sparker systems operate by discharging an electrical pulse from a shipboard power supply using
towed electrodes rapidly creating a vapor bubble that expands and then oscillates with
amplitudes that decay with each bubble pulse, generating a broadband (50 Hz to 4 kHz)
omnidirectional pulse of sound. The source signature is generally repeatable, less so than boomer
signatures, but will vary with towed depth, seawater salinity, and electrode wear. Post-
processing deconvolution is required to collapse the pulse and improve resolution. There are
many types of towed sparkers, some sled-mounted, others just electrodes at the end of a high-
voltage power cable. Input power can range from a few hundred J to over 10,000 J. Higher power
sparker sources can penetrate several hundred meters into the sub-bottom. Because of the
sparker’s relatively high frequency compared to deep-penetration seismic air guns, sparker

April 2024 119
sources are used for high‑resolution shallow imaging. Shot intervals range from two pulses/s in
shallow water to several pulses/s in deep water.
6.4.4 Parametric Systems
The parametric sound source is a hybrid between the swept frequencies of the chirp and the
single pulse from the displacement systems. This system uses the parametric effect, where two
different high-frequency signals are emitted simultaneously. The two high-frequency sound
waves interfere to generate a response signal at the intersection of the original beam, which is
at a different frequency between the two original high-frequency signals (Mosher and Simpkin,
1999). The response is a low-frequency focused (shaped) beam that can be directed to the
seafloor. This secondary signal is between 5–15 kHz (depending on primary frequencies) and has
been used to image features up to 50 meters below the seafloor (Schneider von Deimling et al.,
2016; Wunderlich et al., 2007). Parametric-type systems are found on deep water vessels where
low relief structures and a flat seafloor are primary targets. See Rostek et al. (1991) and Grant
and Schreiber (1990) for test cases using this technology.
6.5 Seismic Data File Format
The conventional file format for seismic data acquisition and distribution is the SEG-Y format (SEG
Technical Standards Committee, 2002). The SEG-Y file consists of ASCII and binary file headers
containing acquisition parameters, binary trace data (and an optional extended textural header
file). The headers and trace data have a consistent byte order and configuration (Table 6.1 and
Table 6.2), as outlined in the SEG Technical Standards Committee (2002). Numerous proprietary
file formats were developed by equipment manufacturers (e.g., EdgeTech JSF, Sonar Equipment
Services SES, or Knudsen KEB formats). Data logging in a proprietary format during acquisition
should coincide with recording in the SEG-Y format or as soon as possible. Convert the proprietary
format to 240-byte SEG-Y version 2 (rev. 2.0 specification). Populate the SEG-Y headers with the
minimum values established in the SEG Technical Standards Committee (2002) and include as
much information about the acquisition parameters as possible. The textural header can be used
to describe values in the binary file and trace headers (e.g., sources X and Y are corrected for
layback). Necessary header fields are in Table 6.1 and Table 6.2.
Table 6.1. Some important fields extracted from the binary header of the SEG-Y file. See SEG Technical
Standards Committee (2002) for complete binary header specifications.
Description
Byte Position
Job identification number
3201 - 3204
Line number
3205 - 3208
Reel number
3209 - 3212
Traces per record
3213 - 3214
Sample rate (or interval)
3217 - 3218
Number of samples per trace
3221 - 3222
Data sample code (IBM or IEEE)
3225 - 3226
Sweep frequency at start (Hz)
3233 - 3234

April 2024 120
Sweep frequency at end (Hz)
3235 - 3236
Sweep length (ms)
3237 - 3238
Sweep type (1 = linear)
3239 - 3240
Measurement system (1 = meters)
3255 - 3256
SEG-Y format revision number
3501
Table 6.2. Data values extracted from the standard trace header of the SEG-Y file.
Description
Byte Position
Value
Trace sequence number
1 - 4
Number of traces in file (integer)
Original field record number
9 - 12
Original field record number (integer)
Trace number within field record
13 - 16
Multi-receiver identifier
Trace identification code
1
29 - 30
E.g., 1 = seismic data (integer)
Source/receiver offset
2
37 - 40
Distance (meter)
Height scalar
69 - 70
Elevation adjustment (+/- scalar)
Coordinate scalar
71 - 72
Coordinates adjustment (+/- scalar)
Source X (source and receiver)
3
73 - 76
Geographic or projected position
(e.g., arcseconds)
Source Y (source and receiver)
3
77 - 80
Geographic or projected position
(e.g., arcseconds)
Delay recording time (ms)
109 - 110
+/- time between initial pulse and
recording
Number of samples
4
115 - 117
Vertical samples per trace (integer)
Sample interval (microseconds)
117 - 118
Sample rate (dt)
Year of recording
157 - 158
Gregorian 4 digit
Day of Year
159 - 160
Julian date
Hour of day
161 - 162
24-hour clock
Minute of hour
163 - 164
0 - 59
Second of minute
165 - 166
0 - 59
Time basis code
167 - 168
E.g., 1=Local, 2=GMT, 4=UTC
Note: See SEG technical standards committee (2002) for complete trace header specifications. 1 - Trace identification code is for
time domain seismic data. 2 - Source receiver offset is in meters. 3 - Trace coordinates (SX and SY) can be in geographic or
projected coordinates. 4 - number of samples per trace (ns) at sampling rate are required.
File names should indicate a survey line number and, if applicable, indicate whether there are
multiple segments in a survey line. The naming convention should be consistent throughout the
survey and described in the metadata and cruise documentation. Use other identifiers (e.g., date
and/or time, cruise/project identification) in the filename. Some acquisition software can set up
file name templates that will automate the naming of files. File names must contain the suffix
indicative of the file format (indicate rev. one and newer SEG-Y files by a .sgy, .seg, or .segy suffix).
Do not change file or line names post-acquisition to avoid unidentified duplicates throughout the
acquisition to archiving workflow.

April 2024 121
6.6 Acquisition
Describe towing and hull mount configuration in cruise logs and diagrams (Figure 6.2 and Figure
6.3) that indicate offsets from the navigation reference point (NRP), typically the GPS position.
Describe fore, aft (layback), port, and starboard offsets and positive and negative conventions. If
the tow vehicle is surface towed, the NRP may have zero offsets if the GPS antenna is on the
vehicle. Layback needs to be measured by wire-angle and wire-out or other means (e.g., USBL)
when the vehicle is towed below the surface water. Logs and SEG-Y textural headers (see SEG-Y
discussion in Chapter 6.5) need to indicate if offset corrections from source to NRP are applied
to coordinates in the SEG-Y header. Horizontal offset corrections can also be applied in post-
processing. Describe the water depth of the source in logs and diagrams, and, if possible,
recorded in the SEG-Y trace headers. For deep-towed vehicles, record pressure-depth data to the
SEG-Y headers with enough precision (equal to sample rate) to apply static corrections during
processing. Record the water depth below the source, preferably in the SEG-Y trace headers, if
using bottom tracking during acquisition or other single or multibeam sonar. Tow depths can
impact the data quality by generating multiples from the water surface that obstruct primary
reflections. In shallow water, avoid this by surface towing or towing the vehicle just below the
prop wash or to the vessel’s side. In deep water, operate deep-towed vehicles closer to the
seafloor to reduce the ensonified area and limit the need for migration in post-processing.
Integrating motion sensors with tow-vehicles or pole-mounted systems allows for real-time
heave (wave swell) correction. This improves heave correction by not smoothing real seafloor
features.

April 2024 122
Figure 6.2. Geophysical towing configuration diagram for multiple acoustic tools and receivers: the offset
measurements between GPS antennae, equipment tow points, and wire out. These offsets can be entered
into the acquisition software to determine layback. Figure from USGS Geophysical Survey 2015-001-FA
(Sweeney et al., 2015).

April 2024 123
6.6.1 Trace Data
Determine sample rates of the digital trace data based on the frequency content of the source
signature. Some acquisition software will set this parameter from the trace data window and
pulse lengths. Other software requires the user to determine parameters from suggested values.
The highest frequency that can be digitized is the Nyquist frequency (Nf) in Hz and the Nyquist
sampling rate (Nsr) in samples/second, where:
Nf=0.5Nsr or Nsr=2Nf.
Figure 6.3. Acquisition log sample: the beginning of an acquisition log during USGS cruise 2019-332-FA
collected in spreadsheet format. The log contains information about the cruise, equipment, personnel,
location, SVP, etc. Time annotated comments include trackline information, sea state, equipment
issues, etc. From Forde et al. (2020).
April 2024 124
Alternatively, the sample interval (Nsi) can be reported in seconds:
Nsi=1/Nsr or Nsi=1/(2Nf).
For example, a chirp sub-bottom system with an upper frequency of 12,000 Hz has an Nsr of
24,000 samples/s or a Nyquist sample interval of 0.042 ms. When selecting the trace window and
sample rates consider that file format limits are limited to recording 32,767 samples per trace.
Record (trace) length is selected to record the deepest reflector of interest, considering two-way
travel time and seismic velocity. In deep water, delay recording time so as not to exceed the
maximum number of samples per trace. Set a trace data window by applying a delay recording
time if it is not desirable to record the water column. Record delay recording times in the SEG-Y
trace header; times can be changed during acquisition to shift the trace data window. Some
acquisition software can change the recording delay from automatic bottom tracking. Proceed
with caution as spurious bottom picks result in undesirable data window shifts, such as not
capturing the seafloor and sub-bottom reflections.
The trace data can be recorded in the SEG-Y file as standard integer and floating-point formats
(International Business Machines [IBM] and Institute of Electrical and Electronics Engineers
[IEEE]). To avoid clipping the trace data and promote capturing the full dynamic range of
amplitudes, use floating point formats when disk capacities are not an issue.
6.6.2 Ping Rates
Ping rates (for chirp) or shot rates (for sparker and boomer) translate to the horizontal distance
between traces depending on ship speed and the ping rate or pings/s. Water depth can constrain
ping rates. Ping rates cannot exceed the delay recording time and trace length time. Some deep-
water chirp systems put multiple pings in the water column, which effectively increases the ping
rate. For inner-shelf chirp surveys, ping rates can be as high as eight pings/s. Boomers and
sparkers fire shots around 0.5–1 s on an inner shelf survey (1 to 2 pings/s). More extensive
sparker surveys in deep water have shot intervals of several seconds. Because ping rates translate
to horizontal resolution, obtain the highest possible rates depending on water depth and system
limitations.
Chirp systems can control the amplitude (power), shape, length, and frequency pattern of the
outgoing pulse. Select the power level to achieve the desired penetration without saturating high
amplitude reflections, such as the seafloor reflector. Higher power settings in shallow water
enhance artifacts and reverberation of the direct signal. The chirp pulse length can be controlled
to enhance penetration and resolution. Longer pulse lengths (20 meters or more) enhance
penetration and minimize TL loss in deep water. Shorter pulse lengths (less than the water depth)
achieve better resolution in shallow water and may be necessary to avoid outgoing pulse
interference with the seafloor (Saustrup et al., 2019). For example, in 10 meters water depth, a
maximum 10 ms pulse length would be appropriate. With increasing water depth, longer pulse
lengths of 30–40 ms provide more acoustic energy and less attenuation with depth.
Polyvinylidene fluoride receivers are becoming more common in chirp systems and achieve
better resolution (reduced footprint) with longer pulse lengths in shallow water. The swept
frequency chirp pulse can be controlled to favor higher resolution with higher frequency
April 2024 125
bandwidths or skewed to lower frequency with deeper penetration results. Manufacturers
provide a range of pulses or can provide custom pulses. Some acquisition software allows the
user to design their pulses. Before starting a survey, pulse designs should be set to the desired
results for the geology and survey goals. Maintain pulse settings for the survey to facilitate
comparison between lines.
6.6.3 Power
Boomer and sparker systems can control amplitude (power). Sparkers control frequency
depending on tow depth (shallow depth increases frequency). The Bubble Gun system is low
power and does not control amplitude whereas the size of the plate controls the frequency.
Shipboard power supplies can produce varying power levels for boomer and multiple boomer
plates (50-1000 J). Multiple boomer or Bubble Gun plates increase SLs. Sparkers can take much
higher power levels depending on size and specifications. More power results in deeper
penetration but may also enhance artifacts (e.g., multiples) and reverberation. Power should be
set lower in shallow water or where deeper penetration is not needed. Environmental
regulations may limit the power levels of boomers and sparkers depending on water depths and
other factors.
6.6.4 Gain
Gain is a time-varied scaling of the signal to enhance weak signals and compensate for signal
attenuation. Do not make gain adjustments to the raw trace data during acquisition. Most
acquisition software can apply display gains in real time and needs to be verified and logged
before the survey. Check raw SEG-Y trace data as part of a QC plan.
6.6.5 Noise
Boomer and sparker systems use analog or digital hydrophones that receive seismic signals and
ambient noise. It is best to eliminate noise in the acquisition process (e.g., power harmonic such
as 60 Hz); high-pass filters may be effective in removing low-frequency noise. Noise that is higher
frequency than the Nf can result in recording aliased noise that shows up as lower frequencies in
the data. Apply a high-frequency cutoff filter before recording data. Parameters for an anti-alias
filter, or the wideband recording filter, should be set to avoid cutting off low and high-frequency
seismic reflections. The high cut is generally 80% of the Nf (Dondurur, 2018).
6.6.6 Storage
Modern hard disk drives have sufficient storage space and input/output (I/O) capability for most
surveys. Typically, data are stored on an acquisition computer as they are recorded and then
copied to a backup device. In some surveys, the data are recorded directly to a network storage
system that requires a robust network, testing, and consideration of I/O from other computers.
The raw data should be copied to a processing computer as a backup and post-processing. Raw
data can be archived on Blu-ray discs.

April 2024 126
Each straight trackline segment is a single file. A recording of the file should continue until there
is a deviation of course (e.g., a turn), significant change in vessel speed (e.g., slowing down for
environmental or hazard reasons), changes to acquisition parameters (e.g., changing pulse
length), or equipment malfunction. However, long recording times of an individual file are not
recommended as it statistically increases the chance of file corruption through software error or
other environmental factors associated with seismic surveys (e.g., loose cable connections, GPS
failure). The length of the uninterrupted trackline ultimately determines file size, but care should
be taken if the trackline becomes exceedingly long. To provide a comparison, a review of
hundreds of chirp lines acquired by the USGS between 2007–2019 found that the most extensive
seismic line, by far, contained 25,000 traces, and most lines were in the 3,000–10,000 trace
range.
6.6.7 Tracklines
Some software acquisition systems can automatically end and start new lines at user-defined
intervals; however, this capability is a carryover from bathymetric survey systems. To enforce
complete and accurate logging of lines and ensure proper attention to data acquisition and
quality, active management of trackline length is recommended over automated systems due to
the previously mentioned limitations to trackline length.
6.7 Safety
Seismic surveys can pose a hazard to marine plants and animals. Deployment cables or towed
systems, either underway or lost at sea, can inadvertently scour habitat or foul and/or impact
animals. Noise from acoustic systems can also be detrimental to marine life. Federal agency
compliance with the Marine Mammal Protection Act (MMPA) will only be addressed in this
chapter through the following description of the physical characteristics of seismic systems in the
marine environment and recommended remediation actions during marine surveys.
HRG chirp, boomer, and sparker sources operate within the frequency range (200 kHz and lower)
of marine mammals. Under the MMPA, the National Marine Fisheries Service and Bureau of
Ocean Energy Management mitigate HRG surveys to limit exposure of sound sources to marine
animals (BOEM, n.d.). Acoustic exclusion zones define distances based on SL decay, where
sources need to be shut down when marine mammals and turtles are observed within this zone.
Trained protected species observers can be used to monitor the acoustic exclusion zone and will
call for a shutdown if marine mammals or turtles are observed approaching the exclusion zone.
Sources can be slowly ramped up to full power at the start of a survey or after sources have been
shut down, so animals have time to move away.
6.8 Data Management
Seismic data management is necessary for efficient use, future access, and validation of analytical
and interpretative results. For specific details and guidelines associated with SBP data
management (such as file formats, data archival, etc.), please see Chapter 1.6.5.
April 2024 127
6.9 Resolution
Seismic system type, source power, and resolution vary among systems. Source type and power
are tailored to provide optimal results for the project’s objectives. The most significant trade-off
with seismic systems in near-surface (<100 m) investigations is between sub-bottom penetration
and vertical resolution. Higher power and lower frequency improves penetration (typically, single
pulse systems resolve depths greater than 50 meters). Higher frequency moderated pulse
systems (such as chirp) best serve shallow, high-resolution studies. Longer pulse lengths are
desirable for penetration but can cause interference with signal return (Saustrup et al., 2019).
Surface texture (e.g., high sand content, cementation) and features (e.g., shoals) also have a
bearing on signal penetration, as does organic matter or gas content of the substrate. All of these
factors must be considered in survey strategy plans, with the highest resolution designed for the
desired target depth.
Technical specifications can be found in the literature that cites specific data resolution for sub-
bottom profiling (e.g., NMAHS, 2017) and used as recommendations for specific goals. Since sub-
bottom data can be used for many research, exploratory, and imaging (e.g., site assessment for
infrastructure placement) purposes, data collection should occur at the highest resolution
available to the equipment and environmental conditions. This ensures data suitable for most
applications (map once, use many times).
Chirp systems provide continuous and high-resolution data on subsurface geological features
within the uppermost 10–15 meters of sediment. The SBP system should achieve a vertical bed
separation resolution of at least 0.3 meters in the uppermost sediments, depending on the
substrate. A medium penetration seismic system—such as a boomer, bubble pulser, or another
low frequency system—can be used to provide information on a sedimentary structure that
exceeds the depth limitations of chirp systems. The system should be capable of penetrating
greater than 10 meters beyond any potential disturbance depth with a vertical resolution of at
least 3 meters. The seismic source should deliver a simple, stable, and repeatable signature near
minimum phase output with usable frequency content.
6.10 Quality Control
Apply basic QC to all SEG-Y files before processing the trace data. If data are recorded in a
proprietary format, they need to be converted to SEG-Y format first. If multiple trace types exist,
extract each trace type to SEG-Y format. Perform the following QC as a minimum:
• Open the file with software designed to read SEG-Y format. If there is a problem with
SEG-Y headers or format, the file may not open. Scan all headers to make sure the
values are correct. Ensure the mandatory header values (Table 6.1 and Table 6.2) are
there.
• Plot header values to verify that there are no outliers or missing values. Plot
navigation coordinates after conversion scalers. Ideally, plot coordinates with ping
(shot) numbers on a GIS basemap.
April 2024 128
• Plot the trace data. Some software can plot the trace data and evaluate headers
simultaneously. Check amplitudes and polarity; full waveform chirp should be bipolar.
Envelope traces should have all positive amplitudes. Check that trace length is
sufficient for the survey goals. Check for avoidable acquisition noise issues (e.g.,
electrical noise).
• Spectral plots of the trace data (entire waveform for chirp) can help identify noise and
help pick filter parameters in post-processing.
• If acquiring in deep water, check that the delay recording time and data windows are
correct in the header. Check source depths and altitudes.
6.11 Processing
Processing of SCS chirp, boomer, and sparker data shares common process steps that produce a
process flow. Chirp processing is mainly limited to static corrections and gain adjustments
because chirp data have a controlled frequency pulse, and the match filter process increases the
signal to noise. Processing the full waveform chirp may require additional steps. Boomer and
sparker data are complete waveforms but not controlled waveforms, so deconvolution should
be applied to collapse the waveform to a spike. The data must be filtered to remove noise outside
the main reflection frequencies.
A typical process flow:
• Static trace shift correction
o Account for deep water recording delay
o Account for source/receiver depth
o Heave removal
o Datum offset
• Noise suppression
o Despike and noise burst removal
o Bandpass and notch filters
o Fxdecon
• Deconvolution (spiking)
• Poststack migration
• Gain
o TVG
o AGC
• Navigation layback correction to update coordinate headers
• Export processed SEG-Y file with updated headers
Static corrections shift the trace data to a corrected vertical position. These static shifts include
recording delay, correction for source/receiver depth, heave compensation, and corrections to a
tidal or another datum. Recording delay should be in the SEG-Y trace headers. Source/receiver
April 2024 129
depths may be static or variable and recorded in trace headers. Heave compensation involves
recording real-time bottom detections, depths from other sonars, or post-processing picks of the
seafloor. The picks are filtered using values estimated from the predominant wave period at the
time of surveying. The difference between original and smoothed picks is used to shift the traces.
Heave filtering differs for boomer and sparker data because source and receiver are offset. Unless
the source and receiver depths are measured independently, the best option for heave removal
is real-time bottom detection during acquisition or picking the seafloor (after a bandpass filter is
applied) and calculating the difference between the seafloor picks and a smoothed seafloor. Care
must be taken, as this process has the potential to smooth out real seafloor features.
Some noise can be removed in acquisition with wideband recording filters (match filters for
chirp), but noise can exist within the recorded data as coherent and random noise. Spectral
analysis of the raw data (entire chirp waveform) can help identify noise and determine filter
parameters. The following filters can be applied to increase the signal-to-noise ratio:
• Choose bandpass parameters to remove undesirable low and high frequencies.
• Notch filters remove discrete or a narrow band of frequencies such as 60 Hz powerline
noise and associated harmonics, an example of coherent noise. Ideally, it is best to
preserve as much frequency content of the primary reflections as possible. Removal
of lower frequency content will decrease penetration, and removal of high-frequency
content will reduce the resolution. Another example of coherent noise is signals
received from another HRG system operating simultaneously (cross talk). Minimize
this during acquisition by controlling triggering.
• Despiking filters can remove relatively higher amplitude noise spikes in the traces.
Multiple reflectors can be considered coherent noise.
• Predictive deconvolution may attenuate multiple reflections in SCS; however, this
may result in degrading the data.
• Suppress random noise with stacking traces. MCS systems can increase signal to noise
by stacking multiple channels for each shot. The matched filter in chirp processing
increases the signal-to-noise.
• Coherency can be enhanced, and random noise in SCS reduced with trace mixing or
taking a running average of amplitudes using a select number of traces. Stacking and
trace mixing, if applied, should come after static corrections, coherent noise removal,
and deconvolution.
Spiking or source signature deconvolution can be used to improve vertical resolution, compress
the seismic wavelet (as in chirp match filtering), decrease ringing, and improve the amplitude
spectrum. Deconvolution of SCS can be processed like a post-stack MCS system. Deconvolution
on the full waveform chirp data may enhance vertical resolution if the match filter does not have
ideal results. Deconvolution can create artifacts depending on the parameters used, so chirp
systems need to be checked periodically to ensure the source signal has not degraded over time.
Ideally, the source signature should be as close as possible to the match filter being used.
Gain recovery can be applied to compensate for spherical divergence, absorption, scattering,
multiple reflections, and other factors that decrease reflection amplitudes with time from the

April 2024 130
source. Spherical divergence correction can balance amplitudes with depth. This method
preserves the relative amplitudes in the data. A time gain function, where amplitudes are
increased trace by trace by raising time to constant power, decreases amplitudes for early arrival
times and increases amplitudes for later times but preserves the relative amplitudes. AGC applies
a sliding window down each trace, and a mean or median scaler is calculated for the window,
and applied, usually to the middle sample in the window. AGC results in better trace-by-trace
balanced amplitudes but does not preserve relative amplitude within the trace.
Migration can move seafloor and subsurface reflection events to their accurate locations,
increasing lateral resolution. Treat migration of SCS as if it were a post-stack MCS system. A
disadvantage of post-stack migration is that relative amplitudes are altered. It is important to
remove noise and artifacts as much as possible before the migration process.
MCS protocols are not discussed in this chapter. However, boomer and sparker sound sources
are increasingly paired with multichannel streamers for very high-resolution continental shelf
surveys; for example, 32 channels (groups) with group spacing as short as 1.5625 meters. Many
MCS processing methods apply to SCS processing, but there are many more methods available
in MCS processing primarily due to having multiple sources to receiver offsets for each shot.
Moveout and stacking alone increase signal-to-noise, and allow for more prestack processing
options—such as multiple suppression, deconvolution, and de-ghosting. The cost-benefit of
acquiring and processing MCS needs to be assessed depending on the survey’s goals.
6.12 Archiving
For specific details and guidelines associated with data archiving, please see Chapter 1.6.5.
Processed data must be evaluated, and fully QA/QC’d by a subject matter expert (see Chapter
6.10) before publication. Archive all datasets in cruise or mission-specific directories and include
supplementary data such as producer organization and contact information, acquisition
navigation (ASCII), acquisition log notes, and processing methods. Include notes on the format(s)
used during data acquisition, equipment issues or malfunctions, and any processing steps applied
to the data in the documentation.
Archiving of seismic data has advanced significantly in the past two decades. All marine seismic
surveys—from past analog archives (for examples of digitizing analog datasets, see Bosse et al.,
2017) to modern digital acquisition—need to be archived in online repositories so that the data
can be accessed in perpetuity, as the geology does not change on human time scales and
acquisition of data is expensive and may not be repeated. Examples of existing repositories
include:
• National Archive of Marine Seismic Surveys (USGS, 2023)
• Lamont-Doherty Earth Observatory Seismic Reflection Field Data Center (LDEO, 2020)
• NOAA Marine Geology and Geophysics (NOAA NCEI, n.d. f.)
• National Science Foundation Marine Geoscience Data System (MGDS, n.d.)
• USGS Publications Warehouse (USGS, n.d. a.)
• USGS Coastal and Marine Geoscience Data System (USGS, n.d. b.)

April 2024 131
Sharing scientific data leads to better collaboration, increases confidence in findings, expands our
understanding of complex geologic systems, leads to new avenues of research, and saves on cost
and energy. Proper data management and archiving of marine seismic data allows for efficient
re-use of data for many purposes, and builds on existing collaborative efforts such as SeaSketch
(SeaSketch, n.d.) and the NOAA Integrated Ocean and Coastal Mapping initiative (NOAA IOCM,
n.d.), which highlights the slogan “Map Once, Use Many Times.”
6.13 References
Baradello, L. 2014. “An improved processing sequence for uncorrelated Chirp sonar data.”
Marine Geophysics Research. 35: 337-344. https://doi.org/10.1007/s11001-014-9220-1.
BOEM. 2020. “Guidelines for Providing Geophysical, Geotechnical, and Geohazard
Information.”
https://www.boem.gov/G_G_Guidelines_Providing_Geophysical_Geotechnical_Geohazar
d_Information_Pursuant_to_30_CFR_Part_585/.
BOEM. 2018. “Geological and Geophysical (G&G) Surveys.”
https://www.boem.gov/sites/default/files/about-boem/BOEM-Regions/Atlantic-
Region/GandG-Overview.pdf.
BOEM. n.d. “BOEM Regions.” https://www.boem.gov/regions/protective-measures.
Bosse, S.T., Flocks, J.G., and Forde, A.S. 2017. “Digitized analog boomer seismic-reflection data
collected during U.S. Geological Survey cruises Erda 90-1_HC, Erda 90-1_PBP, and Erda 91-
3 in Mississippi Sound, June 1990 and September 1991.” U.S. Geological Survey Data
Series. https://doi.org/10.3133/ds1047.
Crocker, S.E. and F.D. Fratantonio. 2016. Characteristics of Sounds Emitted during High-
Resolution Marine Geophysical Surveys. NUWC-NPT Technical Report 12(203): 265.
https://espis.boem.gov/final%20reports/5551.pdf.
Dondurur, D. 2018. Acquisition and Processing of Marine Seismic Data. Elsevier.
https://doi.org/10.1016/C2016-0-01591-7.
EdgeTech. 2020. “JSF file and message descriptions.” https://www.edgetech.com/wp-
content/uploads/2019/07/0023492_Rev_G.pdf.
Forde, A.S., Stalk, C.A., and Miselis, J.L. 2020. “Archive of chirp subbottom profile data collected
in 2019 from Cedar Island, Virginia.” U.S. Geological Survey.
https://doi.org/10.5066/P9S75Q0U.
Grant, J.A., and Schreiber, R. 1990. “Modern swath sounding and sub-bottom profiling
technology for research applications.” Marine Geophysical Research. 12: 9-21.
https://doi.org/10.1007/BF00310559.
Gutowski, M., Bull, J., Henstock, T., Dix, J., Hogarth, P., Leighton, T., and White, P. 2002. “Chirp
sub-bottom profiler source design and field testing.” Marine Geophyiscal Research. 23:
481 – 492. https://doi.org/10.1023/B:MARI.0000018247.57117.0e.
Henkart, P. 2006. “Chirp Sub-Bottom Profiler Processing - A Review.” Sea Technology. 6: 35–38.
https://www3.mbari.org/products/mbsystem/sonarfunction/20061001HenkartChirpSubb
ottom.pdf.

April 2024 132
Lamont-Doherty Earth Observatory (LDEO). 2020. “Data Projects.”
https://www.ldeo.columbia.edu/data-projects.
Marine Geoscience Data System (MGDS). n.d. “Index.” https://www.marine-geo.org/index.php.
Mosher, D.C., and Simpkin, P.G. 1999. “Environmental Marine Geoscience 1. Status and Trends
of Marine High-Resolution Seismic Reflection Profiling: Data Acquisition.” Geoscience
Canada. 26: 174-188. https://journals.lib.unb.ca/index.php/GC/article/view/4024.
NMAHS. 2017. Appendix B: Technical Specifications. Norwegian Mapping Authority
Hydrographic Service and MAREANO Program.
https://mareano.no/resources/files/om_mareano/arbeidsmater/standarder/Appendix-B-
Technical-Specifications-1.pdf.
NOAA IOCM. n.d. a. “U.S. Bathymetry Coverage and Gap Analysis.”
https://iocm.noaa.gov/seabed-2030-bathymetry.html.
NOAA IOCM. n.d. b. “Seabed 2030 Initiative and the U.S. Analysis”.
https://iocm.noaa.gov/seabed-2030.html.
NOAA NCEI. n.d. e. “National Centers for Environmental Information.”
https://www.ncei.noaa.gov.
NOAA NCEI. n.d. f. “Marine Geology and Geophysics.” https://www.ngdc.noaa.gov/mgg/.
Quinn, R., Bull, J.K., and Dix, J.K. 1998. “Optimal processing of marine high-resolution seismic
reflection (Chirp) data.” Marine Geophysical Research. 20: 13 – 20.
https://doi.org/10.1023/A:1004349805280.
Rostek, F., Spiess, V., and Bleil, U. 1991. “Parasound echosounding; comparison of analogue and
digital echosounder records and physical properties of sediments from the equatorial
South Atlantic.” Marine Geology. 99: 1-18. https://doi.org/10.1016/0025-
3227%2891%2990079-J.
Saustrap, S., Goff, J., and Gulick, S. 2019. Recommended “Best Practices” for Chirp Acquisition
and Processing. OCS Report BOEM 2019-039.
https://www.boem.gov/sites/default/files/mm-research/2021-
05/UTIG_BOEM_Chirp_Best_Practices_White_Paper.pdf.
Schneider von Deimling, J., Held, P., Feldens, P., and Wilken, D. 2016. “Effects of using inclined
parametric echosounding on sub-bottom acoustic imaging and advances in buried object
detection.” Geo-Marine Letters. 36: 113 – 119. https://doi.org/10.1007/s00367-015-0433-
3.
Schock, S.G., LeBlanc, L.R., and Mayer, L.A. 1989. “Chirp subbottom profiler for quantitative
sediment analysis.” Geophysics. 54: 445 – 450. https://doi.org/10.1190/1.1442670.
SeaSketch. n.d. “Home.” https://www.seasketch.org/home.html.
SEG Technical Standards Committee. 2002. “SEG Y rev 1 Data Exchange format.” Society of
Exploration Geophysicist.
https://seg.org/Portals/0/SEG/News%20and%20Resources/Technical%20Standards/seg_y
_rev1.pdf.
Sullivan, S.M., Smith, K.R. and D.M. Sackett. 2016. Virginia Ocean Geophysical Survey Phase II
Analyses: Offshore Virginia Wind Energy Area. U.S. Department of the Interior, Bureau of
Ocean Energy Management, Office of Renewable Energy Programs, Herndon. OCS Study
BOEM 2016-056. https://www.boem.gov/sites/default/files/environmental-

April 2024 133
stewardship/Environmental-Studies/Renewable-Energy/VA-WEA-Phase-2-Geophysical-
Report.pdf.
Sweeney, E.M., Pendleton, E.A., Ackerman, S.D., Andrews, B.D., Baldwin, W.E., Danforth, W.W.,
Foster, D.S., Thieler, E.R., and Brothers, L.L. 2015. “High-resolution geophysical data
collected along the Delmarva Peninsula 2015.” U.S. Geological Survey.
https://doi.org/10.5066/F7P55KK3.
USGS. 1989. Geological Survey Safety and Environmental Health Handbook 445-I-H.
https://doi.org/10.3133/70047688.
USGS. 1993. U.S. Geological Survey Occupational Hazards and Safety Procedures Handbook 445-
2-H. https://www.usgs.gov/about/organization/science-support/survey-manual/445-2-h-
occupational-safety-and-health-program.
USGS. 2023. “NAMSS: The National Archive of Marine Seismic Surveys.”
https://walrus.wr.usgs.gov/namss/.
USGS. n.d. a. “USGS Publications Warehouse.” http://pubs.usgs.gov/.
USGS. n.d. b. “Coastal and Marine Geoscience Data System.” https://cmgds.marine.usgs.gov/.
Wunderlich, J. 2007. “Mobile parametric sub‐bottom profiler system for shallow and medium
depth applications.” Journal of the Acoustical Society of America. 122: 2983.
https://doi.org/10.1121/1.2942638.
April 2024 134
Chapter 7: Magnetometry
Brandi Carrier, BOEM
Matt Lawrence, NOAA
Lora Turner, BOEM
Jeff Waldner, BOEM
7.1 Introduction
Magnetometers detect variations in the Earth’s magnetic field. Magnetometer data has many
applications, such as structural geological mapping, energy and mineral exploration, archaeology,
and munitions detection. Analysis of magnetometer data identifies discrete anomalies on the
seafloor and in shallow-buried contexts. This chapter focuses on general magnetic theory related
to anomaly detectability, factors that influence data quality, instrument configuration and
selection, platforms, coverage specifications, resolution/line spacing based on survey objectives,
and validation. This chapter provides overarching guidance and recommendations for the
collection of mapping data from magnetometers; it does not address manufacturer-specific
recommendations or recommendations concerning specific use cases.
7.2 General Magnetic Theory As It Relates to Anomaly
Detectability
Earth’s magnetic field is the sum of multiple contributing sources, which may generally be
categorized by their origins (the vector sum of geological [Earth-based] sources, heliophysical
[external, predominantly solar] sources, and ferromagnetic objects). The field is not static and
varies in strength and direction as the north magnetic pole moves with time, and recent studies
have shown that the Earth’s magnetic field strength has fluctuated by about 9% from the global
average in the last 200 years. The geomagnetic field results from convection of the molten iron-
rich outer core, driven by heat flow from the solid inner core, a process known as the geodynamo.
The second category of contributing sources arises from the static magnetism of the Earth’s crust.
Ferromagnetic material existing on or below the crust, as well as the geological features of the
crust itself (minerals with varying amounts of iron in their composition), alter the field. The third
category of contributing sources arises from the interaction of the Sun's and Earth’s magnetic
fields and large-scale electrical currents in Earth’s atmosphere. These include irregular, dynamic,
and complex solar winds, Earth-directed geomagnetic storms, and typical solar diurnal variation
arising from Earth’s rotation under the influence of the Sun’s ionizing radiation.
The geomagnetic field is a vector field, meaning it has a magnitude and a direction at every point
in space. Often, only the magnitude of the geomagnetic field vector is measured, especially for
geophysical surveys. The magnitude of the geomagnetic field is known as the total magnetic field
(the total field).
In mapping the seafloor and the subsurface ocean environment using a marine magnetometer,
researchers attempt to measure variations in Earth’s total magnetic field in order to identify
structures in the near-surface, such as discrete anthropogenic anomalies (e.g., unexploded

April 2024 135
ordnance [UXO] or archaeological sites with high concentrations of ferromagnetic materials), as
well as larger, deeper geological trends. Magnetic data are used to estimate the age and thickness
of volcanic lava flows at mid-ocean ridges and ocean island hot spots and to explore for
ferromagnetic minerals. The specific protocol for marine magnetic surveys depends on the
intended purpose of the seafloor and subsurface ocean environment mapping. Generally, the
smaller and more discrete the item being explored for, the narrower the survey line spacing and
the lower the instrument altitude above the seafloor must be to have confidence in identification.
Marine magnetometers operate by measuring the total field as they move through the marine
environment. These measurements are collected as time-series data along straight and parallel
lines with the instrument kept at a constant altitude, close to the seafloor (half the survey line
spacing is an appropriate altitude). Collected time-series data may then be processed and viewed
line-by-line or by plotting multiple lines and creating a contour map of the total field. Once
mapped, the geographic location of objects causing magnetic anomalies from the total
background field may be discerned. Magnetic anomalies are sensed perturbations of the
background total field that signify contrasts in magnetic susceptibility, which is the ability of a
substance to take on an induced magnetism caused by its immersion in Earth’s magnetic field.
The magnetic susceptibility of any substance on Earth is equivalent to the mass of its
ferromagnetic components, or in other words, its iron content.
Near-surface ferromagnetic objects appear as individual magnetic dipoles, creating their local
magnetic fields within the larger geomagnetic field. Dipoles exist in two parts: induced and
permanent. Every ferromagnetic object will create an induced dipole proportional to its mass, its
magnetic susceptibility (a characteristic of the material making up the object), and the strength
of the background geomagnetic field. The induced dipole will always be oriented with the
background geomagnetic field.
An object’s permanent dipole is not dependent on the background field as it would remain even
in the presence of no background field. As the object moves, the orientation of the permanent
dipole changes with it. The addition of a permanent dipole is called magnetization, and it can
happen in many ways, including during an object’s formation (cooling from a molten state). An
object can be demagnetized, meaning its permanent dipole can be removed, but not its induced
dipole.
An object’s observable dipole is a vector combination of its induced and permanent dipoles and
appears as a single dipole to a magnetic surveyor.
The Earth itself appears as a large single dipole when viewed from far enough away (Figure 7.1
and Figure 7.2). The north and south magnetic poles currently vary approximately 11.5 degrees
from the geographic north and south poles. The amplitude (height, or intensity/strength) of a
ferromagnetic object’s anomaly, its duration (length of time in time-series data), and its shape
contrasted against the expected background field can help surveyors understand what may have
caused the anomaly sensed by an instrument.


April 2024 137
When a single trackline is graphed as time-series data, anomalies appear in graphically displayed
magnetic data in three primary shapes: monopole, dipole, and multi-component.
Monopole anomalies result when a magnetometer intersects only one pole of a magnetic
anomaly, and the other magnetic pole is far enough away to be unrecorded (Figure 7.3).
Alternatively, an object’s permanent magnetism and induced magnetism may align in such a way
to minimize either the positive or negative expression of the total magnetic field. Monopoles can
be either negative or positive concerning the background magnetic field.
Dipole anomalies result when a magnetometer intersects both the positive and negative portions
of a ferromagnetic object’s total magnetic field. As the sensor moves through the perturbation
of the total field caused by the induced magnetism of the ferromagnetic material in the field, the
sensor’s reading registers as a coupled increase and decrease in amplitude. The dipole’s
orientation will depend upon the object’s orientation, its permanent magnetic characteristics,
and the latitude of the survey (i.e., its nearness to the poles versus the equator) because the
Figure 7.2. Earth’s magnetic field: artist’s rendering of Earth's magnetic field, including orientation of
flux lines, north and south geographic poles, and north and south magnetic poles. Image by Peter
Reid (2009); available at: https://www.nasa.gov/mission_pages/sunearth/news/gallery/earths-
magneticfieldlines-dipole.html.

April 2024 138
strength and orientation of magnetic field lines comprising Earth’s magnetic field vary according
to how far from Earth’s poles the survey is conducted.
Finally, multicomponent anomalies are simply a collection of monopole and dipole anomalies, all
of whose vectors contribute to the cluster of readings in the data. In small anomaly detection,
multicomponent anomalies typically point to multiple sources of ferromagnetic materials, all
with their magnetism interacting with the total field, complicating the picture.
7.3 Factors that Influence Data Quality
7.3.1 Environmental Sources of Noise
Noise is defined as any influence on magnetic field readings that obscures the anomalies that
surveyors seek to detect or reduces the accuracy of the local magnetic field recorded. It includes
geomagnetic storms, diurnal variation, and ocean effect. If the survey’s objective is to identify
subsurface geology, then archaeological sites or UXO are also noise sources. Contrastingly, if the
objective is to identify archaeological sites or UXO, then subsurface geology may be considered
noise.
7.3.1.1 Diurnal Variation
At any given spot on the Earth’s surface, the regional magnetic field varies throughout the day as
the sun-facing side of the planet is influenced by the solar magnetic field. Diurnal variation also
changes throughout the year as the Earth’s position relative to the Sun changes. Diurnal variation
can cause magnetic field readings recorded in close spatial proximity to each other but
temporally distant to have dramatically different magnetic field readings. For example, adjacent
Figure 7.3. Magnetometer time-series data: marked anomalies over a 9 m 30 s period graphed on a 30
nanotesla (nT) scale. Graph from Matthew Lawrence, NOAA.

April 2024 139
survey lines surveyed at significantly different times on the same day or different days can have
very different average levels. One intuitive way to understand the effect of diurnal variation is to
think of it as a ‘magnetic tide’ that has both the regular (daily) and random (storm-based)
components to it, which can either raise or lower the overall total field values on an hourly or
even minute-by-minute basis. See Chapter 7.9 for steps to correct for diurnal variation.
7.3.1.2 Geomagnetic Storms
Occasional solar activity events, such as solar flares, can cause substantial variations in the Earth’s
magnetic field. These events can have a stronger amplitude than normal diurnal variations and
will be present over a wider frequency range, meaning they can disrupt geophysical survey
results. NOAA provides more information about geomagnetic storms (NOAA SWPC, 2023).
Magnetic surveys should not be planned during forecasted geomagnetic storms because the
noise generated by these effects will mask or distort the data signal and interfere with
navigational accuracy for all instruments due to ionospheric scintillation. SpaceWeather.com
provides forecast information for geomagnetic storms (Spaceweather.com, 2023). Solar activity
broadly varies according to an 11-year solar cycle, with the likelihood of extreme geomagnetic
storms occurring more frequently during specific periods. Awareness of geomagnetic storms is
essential as they degrade the accuracy of GNSS and interfere with radio communication.
7.3.1.3 Ocean Effect
Dissolved salt in seawater makes it conductive, and movements of seawater will induce local
magnetic fields. Ocean waves and swell create local fields that are not only detectable by a
magnetometer, but can disrupt geophysical survey data, producing signals exceeding 10 nT at
frequencies around 0.1 Hz. The effect is most pronounced in open ocean and tends to decrease
or disappear in inshore protected areas. The effect is thoroughly described in Weaver (1965).
Ocean tides and currents have also been shown to produce magnetic variation (Tyler et al., 2003),
but are slower in frequency, and are difficult to distinguish from diurnal variation. Utilizing tie
lines (described below in Chapter 7.5.1) can help minimize the effects of this influence on survey
data.
7.3.1.4 Subsurface Geology
Surveys seeking to detect near-surface ferromagnetic objects such as from anthropogenic
sources may find that subsurface geology obscures the variations in the magnetic field the survey
seeks to detect. In general, sedimentary rocks, especially carbonate rocks, tend to be less
magnetic than igneous (basement) rocks, which typically have more iron content. Areas with a
shallower depth-to-basement show more magnetic variation due to geological features and,
most importantly, are closer to the high-frequency band of interest when detecting near-surface
ferrous objects.
Additionally, the structure of the near-surface crust often contains fault lines, boundaries of
dissimilar geologic materials, or erosional features, all of which can cause large-scale magnetic
anomaly patterns if the rock is magnetic. These patterns can be used to study the structure and
geologic history of the region but can also interfere with archaeological/UXO surveys.
April 2024 140
7.3.2 Survey-Induced Sources of Noise
Magnetic data are most accurate when the magnetometer survey is conducted systematically
with consistent towfish altitude, velocity, and line spacing. Changes in any of these factors may
cause false anomalies as the sensor’s orientation in the environment changes during the survey.
Understanding the survey area’s bathymetry and geology can significantly assist in avoiding
survey-induced noise. When making accurate magnetic maps, it is vital to maintain a constant
altitude above the seafloor or constant depth below the surface. Variations in altitude between
adjacent survey lines are difficult to compensate in data processing and can cause significant
errors in the final map.
7.3.2.1 Surge Effects
Magnetometers record less accurate and more inconsistent total field readings when subject to
repeated instrument oscillation from being towed close to the surface in rough seas or vessel
wakes. Additionally, unwanted/unaccounted motion of the towed magnetometer can cause
positional error, which either results in greater uncertainty in the location of anomaly sources or
can distort the anomaly patterns, causing challenges in data interpretation. Correction for these
effects is generally not possible in recorded data. A surveyor should modify instrument
configuration and/or tow parameters to reduce this noise.
7.3.2.2 Survey Vessel Interference
Ensure a sufficient distance between the magnetometer sensor and the survey vessel or survey
platform to prevent the sensor from recording magnetic field readings influenced by
ferromagnetic materials used in the vessel’s construction and magnetic rigging materials or the
electromagnetic fields generated by the vessel or platform (i.e., ROV and AUV). Generally, 3 to 5
times the vessel’s length is a common starting point for minimum sensor layback.
7.3.2.3 Power Supply Interference
Electrical generation systems that power a magnetometer create signal noise through
electromagnetic field interference and insufficient electrical grounding. Grounding loops can
cause detectable electrical currents that can interfere with magnetic data. These currents can
cause active corrosion of the magnetic sensor and vessel. As with any towed marine electronic
device, ground the magnetic sensor to the seawater at a single point and through a capacitor to
prevent direct current flow.
7.3.2.4 Heading Error
The magnetometer sensor’s orientation can cause varying magnetic signal readings to the local
magnetic field. This type of error can be an inherent characteristic of the magnetic sensor or can
be caused by the presence of magnetic material too close to the magnetic sensor or on the sensor
itself, such as towing too close to the survey vessel. This can cause striped data patterns
evidenced in adjacent survey lines that were transited in opposite directions, or errors in the
dataset caused by small changes in the heading that are difficult to eliminate.
April 2024 141
7.3.2.5 Dead Zones
Specific angular orientation of the sensor to the Earth’s magnetic field can result in the sensor
improperly reading the total magnetic field or causing actual gaps in the data. Not all
magnetometers have dead zones; however, each instrument’s user information will guide the
surveyor on how to avoid this situation. Survey transect orientation and instrument configuration
should be chosen to prevent the sensor from entering the particular angular region or “dead
zone” while collecting data.
7.4 Instrument Configuration and Selection
7.4.1 Total Field Versus Other Types of Magnetometers
Magnetometers can be grouped into scalar (total field) or vector magnetometers. A scalar
magnetometer measures only the magnitude of the magnetic field but can do so very accurately,
since it is insensitive to the motion of the sensor during a survey. Scalar magnetometers are the
principal instrument used in marine surveys. Vector magnetometers measure the complete 3D
magnetic field vector and are often used in laboratory or observatory settings where the
instrument can remain stationary. Scalar magnetometers operate using quantum atomic
principles such as nuclear magnetic resonance or electron spin resonance.
7.4.2 Platforms
7.4.2.1 Single Towed Instrument
The most common magnetometer configuration is a single instrument towed by a dedicated tow
cable (Figure 7.4). The use of an altimeter is vital in determining the instrument’s altitude. A
depth sensor can also provide important positioning information but is not as effective for
positioning the magnetometer sensor for optimal data collection.
7.4.2.2 Tandem Tow
Magnetometers can be mated with an SSS or other towed vehicle to simplify the deployment of
the sensors, particularly at greater depths. AUVs and remotely operated towed vehicles offer
increased position accuracy.
7.4.2.3 AUV/ROV/UAV Mounted
AUVs are configured to have integrated magnetometers and tow trailing magnetometers.

April 2024 142
Electromagnetic interference from the vehicle’s propulsion motors create’s challenges with
integrating magnetometers directly into AUVs. These issues are partially addressed by
configurations that tow the magnetometer behind the AUV. Similar to the challenges faced with
integrating magnetometers into AUVs, ROV-mounted magnetometers may be challenged by
proximity to electric propulsion motors.
Aside from being unaffected by sea state, the most significant advantage of an AUV-towed
magnetometer over a vessel-towed one is that AUVs can conduct very high-resolution surveys
even at great depths due to their superior controls and inertial navigation systems. Vessel-towed
high-resolution surveys become increasingly challenging as depth increases due to the required
length of tow cable, resulting positional uncertainty, and other factors.
Uncrewed aerial vehicles (UAVs) are now able to carry specially-designed magnetometers. These
systems can collect data in shallow water or impassable coastal terrain. Technological advances
are leading to the development of smaller, more efficient, capable magnetometer sensors. These
sensors can be more easily integrated into USVs, ROVs, AUVs, and UAVs.
7.4.2.4 Configuration
While single magnetometers are typical, two to four magnetometers can be grouped into
different configurations to form gradiometers. Standard configurations that are commercially
available include:
Figure 7.4. A towed magnetometer detecting a seafloor-based object graphic: direction of local field
and dipole field of feature illustrated.
https://www.assignmentpoint.com/science/geography/magnetic-survey.html
April 2024 143
1) Two sensors, separated by a fixed distance and towed longitudinally. Longitudinal
gradiometers created by linking sensors along a tow cable are used by geologists as the
sensors can be placed farther apart, making the gradiometer more sensitive to distant
magnetic sources.
2) Two sensors, held in a frame a fixed distance apart, are towed so that the sensors are
either horizontally or vertically separated. Horizontal gradiometers are well suited to
archaeological surveys.
3) Four sensors arranged at the ends of a cross offer independent horizontal, vertical, and
longitudinal gradients of the ambient magnetic field. UXO surveys benefit from this sensor
arrangement.
An essential feature of horizontal or four sensor gradiometers is their ability, through magnetic
gradient data processing, to emphasize nearby magnetic sources and suppress the distant ones,
resulting in improved data quality and a more focused survey effort. Depending upon the
instrument’s configuration, calculations using each sensor’s simultaneous reading can remove
noise caused by diurnal variation and more closely pinpoint the ferromagnetic source.
Utilizing two independently towed magnetometers separated by several meters can increase the
data density (effectively decreasing the space between lines) without added vessel and crew
time. Determining a gradient in this configuration is less precise because the distance between
instruments cannot be precisely determined. For example, a planned survey with 20 meters line
spacing could tow 2 magnetometers 10 meters apart to create 10 meters line spacing effectively.
This approach becomes increasingly more practical (compared to having a rigid frame) as the
distance between magnetometers increases.
7.5 Sensitivity and Accuracy
Most commonly available total field magnetometers are sensitive enough to detect magnetic
field variations in fractions of a nanotesla. The Tesla (T) is the SI unit for magnetic field strength.
Magnetic survey units are typically billionths of a Tesla or nT. An obsolete term for this unit is
gamma. Higher sampling rates may decrease sensitivity and accuracy.
7.5.1 Coverage Specifications
The smaller and more discrete the item being explored for, the narrower the survey line spacing
must be to have confidence that it can be identified in the survey. The strength of the magnetic
dipole created by a ferromagnetic object decreases rapidly with the cube of the distance from
the object. To adequately plot and thus map the geographic location of anomalies, the magnetic
field must be sampled consistently and at a high enough resolution to provide sufficient data for
this purpose. Data density depends on the distance between survey lines, altitude of the
instrument off the seafloor, and rate of sampling along each line, which is a function of vessel
speed (towfish or AUV), divided by the sampling rate of the instrument.
Line spacing is simply the distance between survey lines, extending the length of the entire survey
area. Altitude is the distance above the seafloor that the instrument is maintained. The optimum
April 2024 144
altitude for near-surface ferrous target investigation is one-half the survey line spacing. Surveying
closer to the seafloor increases the signal from anomalies but does not improve the overall
resolution of the final survey unless line spacing is also reduced because anomalies will be missed
between survey lines. Smaller targets are likely to be missed when the survey is conducted
farther from the seafloor. Because many survey areas contain large boulders, debris, and other
obstacles that may damage or hang a towed instrument array, the survey altitude may need to
be adjusted for practical purposes to avoid risking damage to or losing the instrument. It is
preferable to have a consistent altitude than to have a constantly varying altitude to avoid
obstacles.
The following examples illustrate the interplay between sensor altitude and line spacing for small
UXO or archaeological object surveys. The smallest object to produce a one nT detectable
anomaly (typical detection threshold for a very “quiet” location) in a survey with 6-meter altitude
and 6-meter line spacing would have to be at least 5.9 kg (in ferrous content mass). If the local
noise level necessitates that the minimum detectable anomaly threshold increases to 10 nT
(typical for most locations), the most negligible detectable mass also increases to 59 kg. Since
line spacing is usually greater than altitude in most surveys, this minimum mass increases even
further. For a survey conducted with 20-meter line spacing and 6-meter altitude, and a worst-
case scenario where the object is located between 2 survey lines, the minimum 1 nT anomaly
detection would require a 22.7 kg object to create a 10 nT anomaly. At the same time, lowering
the recommended altitude to 3–4 meters would increase the resulting anomaly by nearly 6–8
times (making it easier to detect), or correspondingly, reduce the minimum detectable mass by
two times if the anomaly threshold should remain the same (again making it far easier to detect).
The main goal in equipping magnetometers with altimeters is to enable the operator to maintain
a lower altitude, which significantly increases the chances of success for small-object surveys.
Finally, sample density is determined by dividing the instrument’s speed over the bottom by the
rate at which the sensor makes magnetic field measurements. For example, for anomaly
detection, the data sampling rate of the instrument should be greater than or equal to 4.0 Hz (or
4 cycles per second) with the vessel traveling no more than 4–5 knots to ensure sufficient data
point density. Magnetic field readings should ideally be collected approximately every 0.5 meters
and no more than 1 meter along a survey line (BOEM, 2020). Some recently developed
magnetometers have the ability to sample at rates as fast as 1000 Hz, which is particularly helpful
for highspeed survey platforms such as UAVs. Surveyors have found that these sampling rates
introduce interference at the 50/60 Hz frequency at which most electrical devices operate. Users
should be aware of this interference and utilize a frequency filter when processing data.
In addition to acquiring data on equally spaced and parallel primary survey lines, surveyors should
seek to record data on tie lines perpendicular to the primary survey lines at 500-m intervals. Tie
lines provide another means for eliminating environmental noise caused by diurnal variation
during data processing. Ideally, tie lines should be collected together as a set close in time. This
will help reduce the effect of diurnal variation on the different tie lines and in turn, help the data
analysis.
Other considerations that affect coverage include line orientation, sea state, the direction of the
survey to avoid dead zones, ability to maintain a consistent altitude above the bottom, the
April 2024 145
rugosity of the seafloor topography, and ability to follow seafloor structures. For example, if the
survey aims to identify a geologic feature, orienting the survey lines perpendicular to the feature
may be more valuable than orienting north-south. Planning survey lines to be roughly parallel to
the coast may make it easier to maintain constant altitude in areas where seafloor slopes
significantly away from shore. Surveyors need to be aware that transiting planned lines going
with the prevailing current may cause the magnetometer altitude to be different on adjacent
lines running against the current. Inconsistent altitude caused by this situation may result in a
striped data pattern similar to that caused by heading error. Adjust the tow cable length to
maintain a consistent altitude. Ship information is essential in assessing and interpreting variance
in altitude, and identifying variance from “porpoising” (when forward thrust forces the bow of
the towed equipment up and out of the water) and tugging (which are effects of sea state) visible
in data.
7.6 Resolution/Line Spacing Based on Survey Objectives
7.6.1 Unexploded Ordnance
For surveys whose primary objective is to identify UXO, enact survey line spacing of 5 m. The
ferromagnetic mass of many discrete munitions of explosive concern is small, the need to find
these objects and safely remove them from a survey area warrants the additional survey time
and cost. Survey altitude should be kept as low as possible; 2–3 meters is ideal, and 3–4 meters
is adequate. A horizontal gradiometer with a typical sensor spacing of 1–3 meters is especially
useful in such surveys, as it eliminates the effects of diurnal variation and focuses on smaller
near-surface sources.
7.6.2 Archaeological Survey
Survey line spacing for archaeological site detection should be driven by the need to sample the
project or survey area (for example, survey to locate all archaeological resources within an area
to be dredged) or by the intention of finding a particular object (for example, as in the search for
a shipwreck that was likely lost in a particular area). When conducting a general survey for the
purposes of sampling the project or study area, line spacing should be no greater than 30 meters
with an altitude of no greater than 6 m. This initial search methodology is an example where the
approach of towing two separate magnetometers separated by 5–10 meters becomes
exceptionally useful since it dramatically improves the chances of encountering something. Once
a discrete anomaly is detected, perform a narrower line spacing survey around the anomaly in a
“boxing” fashion. One-third to one-half of the original line spacing would be appropriate. A
horizontal or vertical gradiometer with a typical sensor spacing of 1–3 meters is especially useful
in such surveys, as it eliminates the effects of diurnal variation and highlights smaller near-surface
sources.
When conducting a survey targeting the identification of a particular archaeological site, a survey
line spacing narrow enough to sense the expected ferromagnetic material of the site is necessary.
In some cases, such as when searching for ancient wooden-hulled shipwrecks containing small

April 2024 146
magnetic components, line spacing of 5 meters with an altitude of no greater than 3–4 meters
may be necessary, or the wreck site could be missed by the survey entirely. An altitude of 3
meters would produce eight times the signal of a 6 meters altitude and detect targets half the
size. Wooden-hulled wreck sites with only a tiny quantity of ferrous material should be surveyed
similarly to UXO sites—with the lowest practical altitude, to maximize the signal and overall
resolution. See column “Mag Special Order” in Table 7.1 for survey parameters.
7.6.3 Geologic Mapping
For geologic mapping or mineral detection, perform surveys using wider survey line spacing than
used for archaeological surveys, and interpolate the resulting data across longer distances.
Suitable line spacing may be increased to 150 m, which is an example of a situation where a large-
span gradiometer can be useful, such as a longitudinal gradiometer with a 50–150 meters
separation between sensors. It eliminates the effects of diurnal variation and focuses on
deeper/more distant sources. See column “Mag Order 1” in Table 7.1 for survey parameters.
Table 7.1. Survey parameters delineated by the magnetic survey objective.
Survey Type
Mag Order 1 – only
useful for geological
surveys and may not be
used for cultural surveys
Mag Special Order – useful for
both geological, archaeological,
and UXO surveys
Area description
General description of
geologic features is
desired (exploration)
Area characterized is critical
Magnetic field sensitivity
Should be 1.0 nT or less
Should be 1.0 nT or less
Background noise
Should not exceed a total
of 3.0 nT peak to peak
Should not exceed a total of 3.0
nT peak to peak
Data sampling rate
1 Hz
Should be equal to or greater
than one sample per meter of
distance traveled along a survey
line. Higher survey speeds
require higher sampling rates. 4
knots would require a minimum
2 Hz sampling rate
Instrument altitude
One-half the survey line
spacing.
Not to exceed 6 meters above
the seafloor
Tow speed
As fast as practical given
instrument configuration
Tow speed should not exceed
sampling rate
Timing
UTC
UTC
Positioning
+/- 10 meters
+/- 2 meters

April 2024 147
Line spacing for
feature/anomaly detection
150 meters
Not to exceed 30 meters with
500-meter tieline spacing
Line spacing for anomaly
search
N/A
Additional parallel lines at 10-
15 meters to characterize
anomaly, with additional
perpendicular lines; one line at
least passing through the likely
anomaly center
Data quality
Low sea state, little
noise/interference, no
earth-directed
geomagnetic storms, Kp
less than 5
Low sea state, little
noise/interference, no earth-
directed geomagnetic storms,
Kp less than 5
7.7 Validation
Before beginning a magnetometer survey, deploy the instrument for a short test to visually assess
the incoming data in a graphical format. This ensures that magnetic field readings are not
compromised by noise. Validation cannot be accomplished while the instrument is on the deck
of the survey vessel due to the vessel’s influence on the sensor. Deploy the magnetometer just
below the surface or into the water column at an altitude sufficiently above the bottom to be
outside the effect of potential seafloor anomalies. The instrument’s layback should be well
beyond the potential influence of the vessel. Depending upon its construction characteristics, the
recommended layback distance is between three to five times the vessel’s length. Layback from
a steel-hulled vessel will need to be greater than a fiberglass hull. Review the data for a total
magnetic field reading consistent with the average total field reading found at that geographic
location. If present, signal noise as described above should be identifiable in graphically displayed
data. Eliminate as much noise as possible. Digital filtering is not usually effective; noise
elimination might include grounding equipment or changing the tow-body to improve stability.
Further validation may be performed in seeking to find munitions of explosive concern. Detecting
the anomalies created by these generally small items is particularly difficult. To ensure optimal
instrument performance, surveyors may use test objects of similar characteristics to validate
survey methodology and proper equipment function. The results of test data collection around
the test targets can ensure that the magnetometer is detecting even tiny anomalies at a certain
distance from the test target. Similarly, surveyors seeking archaeological resources may find it
appropriate to conduct a confidence check of their equipment. This consists of a defined trackline
survey over a known archaeological resource to review the instrument’s performance against an
item of known characteristics.
Magnetometers equipped with a depth sensor must have that sensor zeroed to the water’s
surface before data collection to ensure proper readings. This requires a short (10-15 minutes)
adjustment period to achieve thermal equilibrium with local water temperature before depth
calibration can be performed. Configure magnetometer acquisition software to interpret the

April 2024 148
depth sensor results for either fresh or saltwater. Adjust similar fresh/saltwater configuration
settings for a magnetometer equipped with an altimeter.
7.8 Data Management
Management of magnetometer data is necessary for efficient use, future access, and validation
of analytical and interpretative results. Archive the raw and processed data to ensure
preservation of data to the fullest extent.
For specific details and guidelines associated with minimum magnetometer data requirements
and management (recommended file formats, metadata, data archival, etc.), see Chapter 1.6.6.
7.9 Processing
7.9.1 Filtering of Time-Series Data
Following data acquisition, use the acquisition software to graphically review the data to remove
anomalous readings caused by intermittent noise. Noise generally consists of a few readings far
beyond the range of surrounding readings and graphically presents as a spike in the data. At the
surveyor’s instruction, the acquisition software replaces anomalous readings with readings
interpolated from the readings on either side of the spike in the time-series data.
7.9.2 Removal of Background Field
Removal of heliophysical (solar interaction with Earth’s magnetic field) noise is a critical step
toward ensuring proper data interpretation. Do this by subtracting time synchronized magnetic
field readings from a base station, magnetic field observatory, or mathematical model of the
Earth’s magnetic field from the survey data. The formula is:
B(corrected) = B(survey) - B(base station) + datum,
where B is magnetic flux density. The datum is a constant number for the entire survey and is
required to align the absolute value of B (corrected) with the approximate absolute value of the
local field. This value is determined from the International Geomagnetic Reference Field model.
Without the datum correction, the resulting B (corrected) is known as the residual field.
7.9.2.1 Base Stations and Magnetic Field Observatories
Dedicated base station magnetometers deployed as part of the survey methodology are the best
way to record data to correct diurnal variation at the survey site. The base station should be
deployed within the survey area or within a few km of the survey area. Some base station
magnetometers can be deployed underwater with an acoustic release to retrieve the instrument.
The greater the distance the base station is deployed from the survey area, the less effective its
data are in correcting for diurnal variation. A base station sited a given distance on an east-west
axis provides more usable data than one located the same distance away on a north-south axis.

April 2024 149
It is essential to compare the base station’s underlying geology to the geology in the survey area.
For example, a base station sited over igneous rock will record substantially different magnetic
field variation due to diurnal variation than the actual influence of diurnal variation’s effect on a
magnetometer surveying a limestone environment. The base station should be deployed in an
area of low magnetic gradient away from sources of human interference such as industry or
vehicular traffic.
The magnetic observatory data reporting network INTERMAGNET provides time-stamped
geomagnetic field readings that can be used to correct for diurnal variation (GitHub Intermagnet,
n.d.). Observatory data, even hundreds of km from the survey area, can be used as long as the
observatory is located above geology similar to that found in the survey area. Surveyors should
choose the observatory closest to their survey area. Unfortunately, few observatories in North
America are adjacent to the coastline (Figure 7.5).
7.9.2.2 Gradient
The magnetic gradient is the rate of change of the magnetic field through space. While the
magnetic field created by a magnetic dipole decreases in magnitude with the cube of the distance
from the dipole, the magnetic gradient created by the dipole decreases even more rapidly (to the
fourth power of the distance). This makes the gradient very useful for distinguishing between
small, nearby magnetic sources (such as ferrous objects) and large, distant sources, such as
geological structures.
Although the total magnetic field is a scalar quantity, the gradient of the total field is a three-
dimensional vector. The direction in which it is measured is vital. The gradient is most commonly
measured by simultaneously measuring the entire field with two or more sensors, which must be
Figure 7.5. Magnetic observatories in the United States operated by USGS.
https://www.usgs.gov/media/images/geomag-observatory.

April 2024 150
synchronized and accurately positioned to each other. Some manufacturers have developed
gradiometers with three or more magnetometers, each arranged in a tow vehicle with a specific
orientation. These devices can measure all the vector components of the gradient and provide
highly accurate locational information for anomaly sources. Gradiometers with three or more
sensors can be used for archaeological surveys but are more likely to be employed for UXO
detection. Using a four-sensor gradiometer with a specific configuration to directly measure the
total magnetic gradient (also known as analytic signal) can effectively bypass much of the data
processing and delivering the final product in real-time. The solar influence on the Earth's
magnetosphere happens over a vast distance and does not significantly affect local magnetic
gradients. For this reason, magnetic gradient data do not need correction for diurnal variation.
7.9.3 Anomalies
7.9.3.1 Anomaly Detection from Single Line Data
Surveyors seeking to locate discrete anomalies caused by archaeological resources or UXO often
use graphical representations of single survey line data (also known as profiles) (Figure 7.3) to
identify anomalies as a first step. Most magnetometer data acquisition software provides this
data review option. To identify anomalies, the surveyor looks for high intensity, short duration
changes to background magnetic field readings. The characteristics of the anomaly in this data
display provide some information to characterize the anomaly’s source, but it is not an effective
means of precisely localizing the source object’s location. GIS display of multiple line anomalies
can give a better, two-dimensional approximation of a source position (Figure 7.6). Additional
data sources, such as SSS records or high-resolution bathymetry combined with the line
anomalies in a GIS, greatly assist with data analysis.
7.9.3.2 Anomaly Detection from Contoured Data
Magnetometer data visualization is best accomplished through contouring the recorded
magnetic field readings following the removal of diurnal variation (Figure 7.7). Since
magnetometers only record the magnetic field readings at the sensor’s location, you must
interpolate data between readings along the survey line or between two lines. A process known
as gridding is used to create a regularly spaced numerical matrix representing the data in two
dimensions. The minimum curvature algorithm is the preferred interpolation process for
magnetic data (Briggs, 1974). Machine contouring using minimum curvature gridded data
provides a more accurate anomaly location represented by the most significant changes in the
magnetic field.

April 2024 151
Figure 7.6. Line anomaly graphic: GIS display of line anomalies detected during an archaeological
survey that are color-coded to anomaly intensity. Matthew Lawrence, NOAA.

April 2024 152
Figure 7.7. Contoured magnetic data: GIS display of contoured magnetic data from an archaeological
survey focused on a buried wreck. Twenty-meter survey line spacing detected the wreck over several
lines. The contoured data reveal the location of concentrated magnetic material. Image by Matthew
Lawrence, NOAA.
April 2024 153
7.10 References
BOEM. 2020. “Guidelines for Providing Archaeological and Historic Property Information:
Pursuant to 30 CFR Part 585.”
https://www.boem.gov/sites/default/files/documents/about-
boem/Archaeology%20and%20Historic%20Property%20Guidelines.pdf.
Briggs, I.C. 1974. “Machine Contouring using Minimum Curvature.” Geophysics. 39(1): 39-48.
https://doi.org/10.1190/1.1440410.
GitHub Intermagnet. n.d. “Intermagnet.” https://www.intermagnet.org/imos/imomap-eng.php.
NOAA SWPC. 2023. “Geomagnetic Storms.”
https://www.swpc.noaa.gov/phenomena/geomagnetic-storms.
Spaceweather.com. 2023. “What’s Up In Space.” https://spaceweather.com/.
Tyler, R. H., Maus, S., and H. Lühr. 2003. “Satellite observations of magnetic fields due to ocean
tidal flow.” Science. 299(5604), 239-241. https://doi.org/10.1126/science.1078074.
Weaver, J.T. 1965. “Magnetic variations associated with ocean waves and swell.” Journal of
Geophysical Research, 70(8): 1921-1929.
https://agupubs.onlinelibrary.wiley.com/doi/abs/10.1029/JZ070i008p01921.
April 2024 154
Appendix A - Applicable Standards
The use of applicable standards is key to reusability, clarifies ambiguous meanings and their
metadata can reduce redundancy and improve usability.
Applicable Data Standards (attribute, accuracy, quality,
archive, exchange (transfer, syntax), service (distribution))
○ International Organization for Standardization (ISO)
■ ISO 8601 (date and time)
■ ISO 6709 (latitude, longitude and depth)
■ Chapter 6 from IHO S-44 includes minimum metadata
(https://iho.int/uploads/user/pubs/standards/s-44/S-
44_Edition_6.1.0.pdf)
○ American Standards Institute (ANSI)
■ ANSI INCITS 30-1997 (R2008) (date and time)
○ Industry
■ SEG-Y (seismic)
○ Federal
■ NIST FIPS PUB 4-2
■ FGDC Document Number FGDC-STD-007.5-2005 - Geospatial Positioning
Accuracy Standards Part 5: Standards for Nautical Charting Hydrographic
Survey
Applicable Data Guidelines / Protocols
○ Industry
■ Lurton, X., Lamarche, G. 2015. Backscatter measurements by seafloor‐
mapping sonars. Guidelines and Recommendations.
https://geohab.org/wp-content/uploads/2018/09/BWSG-REPORT-
MAY2015.pdf.
○ Federal
■ BOEM. 27 May 2020. “Guidelines for Providing Archaeological and
Historic Property Information: Pursuant to 30 CFR Part 585.”
https://www.boem.gov/sites/default/files/documents/about-
boem/Archaeology%20and%20Historic%20Property%20Guidelines.pdf.
■ U.S. Department of the Navy. n.d. “Naval History and Heritage Command
Methods and Guidelines for Conducting Underwater Archaeological
Fieldwork.” https://www.history.navy.mil/research/underwater-
archaeology/sites-and-projects/Guidelines.html.
April 2024 155
Applicable FGDC-endorsed Metadata Standards
○ INCITS 453 - 2009, Information technology - North American Profile of ISO
19115:2003 - Geographic information - Metadata Industry-standards
○ Federal Geographic Data Committee. FGDC-STD-001-1998. Content Standard for
Digital Geospatial Metadata (revised June 1998). Federal Geographic Data
Committee. Washington, D.C
○ ISO 19115-1:2014 Geographic information—Metadata—Part 1: Fundamentals
○ ISO 19115-2:2009 Geographic information—Metadata—Part 2: Extensions for
imagery and gridded data
○ ISO 19139:2007 Geographic information—Metadata—XML schema
implementation
○ ISO 19157:2013 Geographic information—Data Quality
○ ISO/TS 19157-2:2016 Geographic information—Data quality—Part 2: XML schema
implementation
○ ISO 19115-3:2016 Geographic information—Metadata—Part 3: XML schema
implementation for fundamental concepts

April 2024 156
Appendix B - Data Standard | Data Structure
Magnetometer Attributes
Name
Format
(Data
Type)
Definition
Applicable Standard(s)
Latitude
String
(10)
Y coordinate (Latitude) of anomaly in original
datum/projection; Latitude is a number preceded by a
sign character: A plus sign (+) denotes northern
hemisphere or the equator and a minus sign
(-) denotes southern hemisphere; in Decimal Degrees
to six decimal places;
+/-DD.DDDDDD
FGDC-STD-001-1998;
ISO 6709
Longitude
String
(11)
X coordinate (Longitude) of anomaly in original
datum/projection; Longitude is a number preceded by
a sign character: A plus sign (+) denotes east longitude
or the prime meridian and a minus sign (-) denotes
west longitude or 180° meridian (opposite of the
prime meridian); in Decimal Degrees to six decimal
places
+/-DDD.DDDDDD
FGDC-STD-001-1998;
ISO 6709
Horizontal
Datum
String
(50)
Horizontal reference frame (e.g., NAD83, WGS-84,
etc.) for water depth, Original horizontal datum and
units (meters, feet, etc.) used during data acquisition
Vertical Datum
String
(50)
Vertical datum (e.g., MLLW, NAVD88, etc.) for water
depth
Coordinate
System
Information about the spatial reference frame used.
Geographic or Projected.
Date
year-month-day; YYYY-MM-DD, exact date the reading
was recorded, in UTC Time
ISO 8601
Time
hh:mm:ss; exact time the reading was recorded, in
UTC
ISO 8601
Instrument
String
(50)
Instrument type
Raw Magnetic
Readings
(Amplitude)
for each
instrument,
and indication
of which
Double
(8)
Peak signal strength (gammas), where 1 gamma = 1
nano Tesla

April 2024 157
instrument the
reading is from
Reference field
used
Reference field used (if reporting anomaly data)
Gradiometer
Altitude
Double
(8)
Definition: Sensor altitude meters, height of sensor (in
meters) above the seafloor
Survey Line
Number/Name
String
(30)
Survey line ID number in which anomaly was
recorded/observed
Anomaly ID:
String
(30)
Unique feature ID assigned during survey
Comment
String
(250)
Additional comments or recommendations (e.g.,
related to survey conditions, interpreted anomaly,
notable uncertainties, etc.)
Contractor |
Company |
Organization |
Agency
String
(50)
Name of contractor or agency that collected the data
Duration
Double
(8)
Along-track duration (in meters) of anomaly signal
Magnetometer
Type
String
(50)
Specific type of scalar or vector magnetometer
Project Name |
Campaign
Name
String
(100)
Name of project/cruise/study
Sensor
Configuration
String
(50)
Such as a single instrument total field magnetometer
or multiple sensors in a gradiometer configuration
Signal Type
String
(2)
Anomaly signal type: M (unspecified monopole), M+
(positive monopole), M- (Negative Monopole), D
(Dipole), MC (multi-component)
Survey
Number ID
String
(100)
Specific numerical- or letter-based designation a
contractor may give to an individual survey or
reference in a survey report
